Workshop on Data-Driven Economic
Agent-Based Models (DDEABM)
Sant'Anna School of Advanced Studies, Pisa, 27-28 September 2022
Data Assimilation for Agent-Based Models
Nick Malleson and Patricia Ternes
University of Leeds, UK
n.s.malleson@leeds.ac.uk
Slides available at:
https://urban-analytics.github.io/dust/presentations.html
Quantifying Real-Time Urban Dynamics
People are the drivers of processes in cities
We need to understand mobility patterns:
Crime – how many possible victims?
Pollution – who is being exposed? Where are the hotspots?
Economy – can we attract more people to our city centres?
Disease - which times / places have large numbers of interactions
Vision
An ABM that simulates urban processes
Updated in real-time using data assimilation
A 'digital twin'?
Presentation Outline
Data assimilation and ABM challenges
Latest research with a Particle Filter and a crowd simulation:
'Vanilla' filter
Estimating categorical parameters
Other opportunities
Unscented / Ensemble Kalman Filters
MCMC sampling
Data Assimilation for Agent-Based Modelling
Thanks
Josie McCulloch, Alison Heppenstall, Keiran Suchak, Minh Kieu, Molly Asher, Kevin Minors, Andrew West, Dan Tang, Yannick Oswald, Robert Clay, Annabel Whipp, Jon Ward, Thomas Crols
Why we need Data Assimilation
Complex models will always diverge
(due to inherent uncertainties in inputs, parameter values, model structure, etc.)
Possible Solution: Data Assimilation
Used in meteorology and hydrology to bring models closer to reality. Combines:
Noisy, real-world observations
Model estimates of the system state
Data assimilation v.s. calibration

Challenges for using DA with ABMs
Model size
10,000 agents * 5 variables = 50,000 distinct parameters
Agent behaviour
Agent's have goals, needs, etc., so can't be arbitrarily adjusted
Assumptions and parameter types
Maths typically developed for continuous parameters and assume normal distributions
... but, at least, many of these problems are shared by climate models
Real Time City Crowd Modelling

Simulating a city in real-time is too hard!! (for now)
For now lets start a crowd
What methods can we use to incorporate data?
How much data do we need?
Track every individual?
Track some individuals?
Just aggregate counts (e.g. number of people passing a footfall camera)
Data assimilation with a Particle Filter
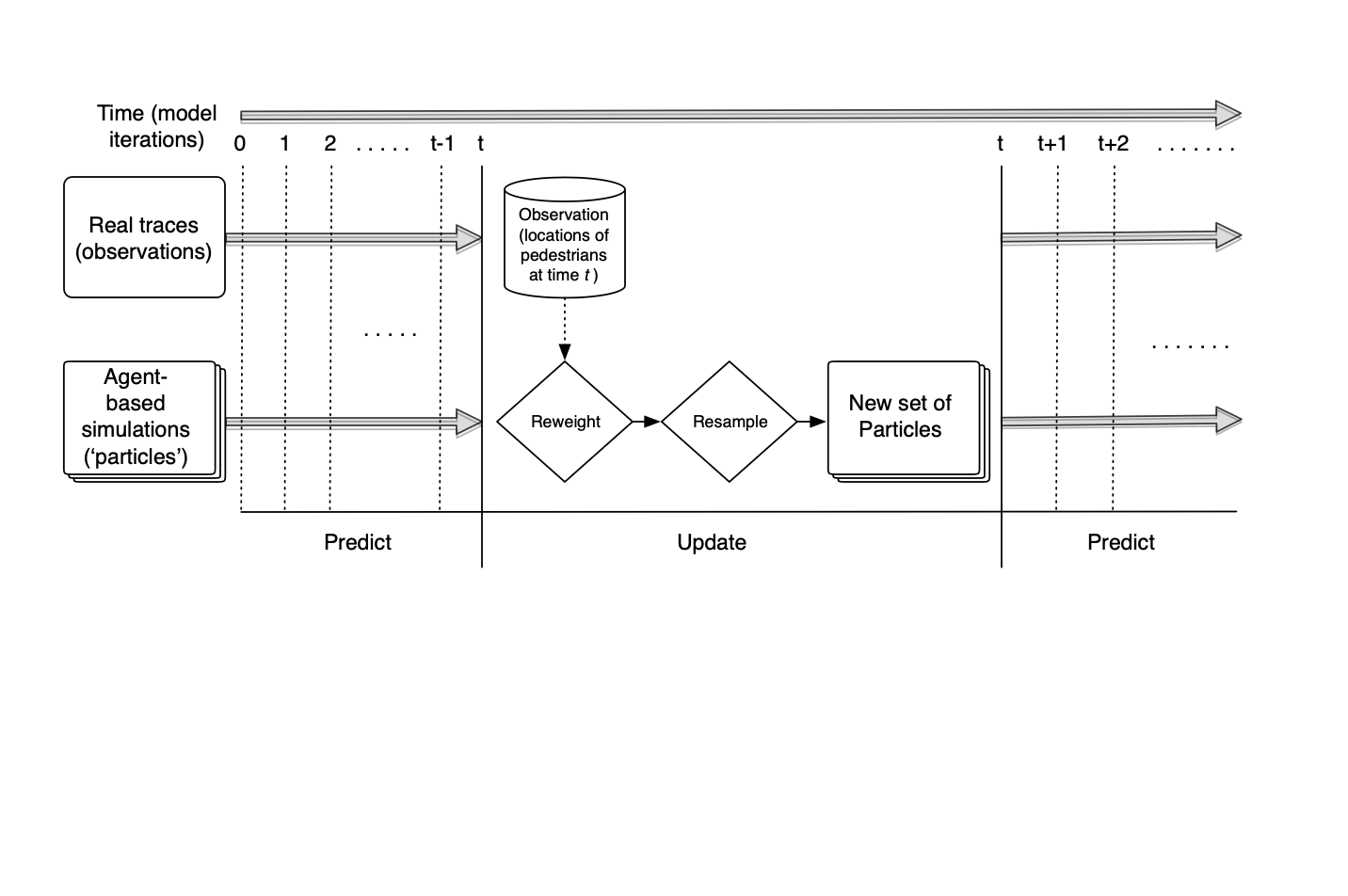
Particle Filter & Crowd Simulation
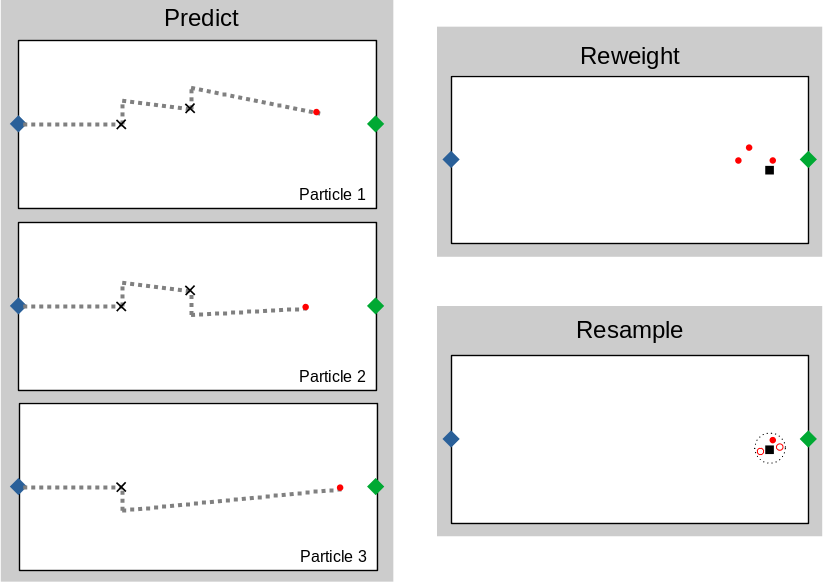
Crowd Simulation with a Particle Filter
Preliminary Particle Filter Results
Box Environment: More particles = lower error
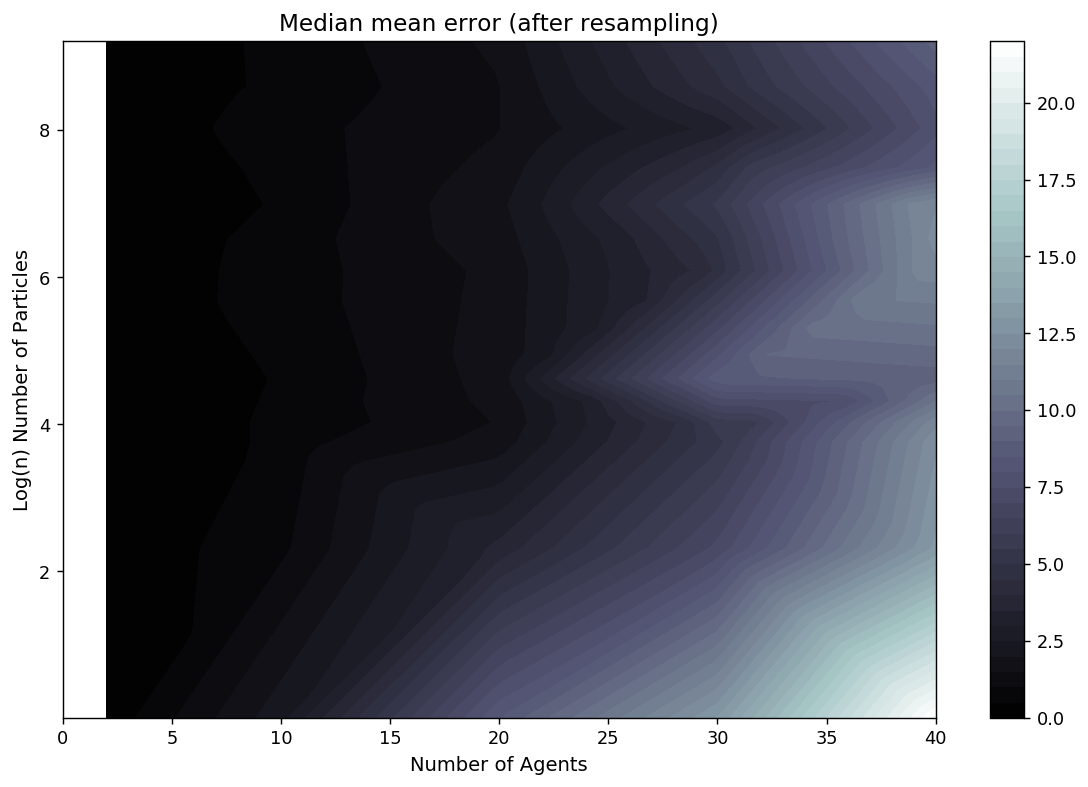
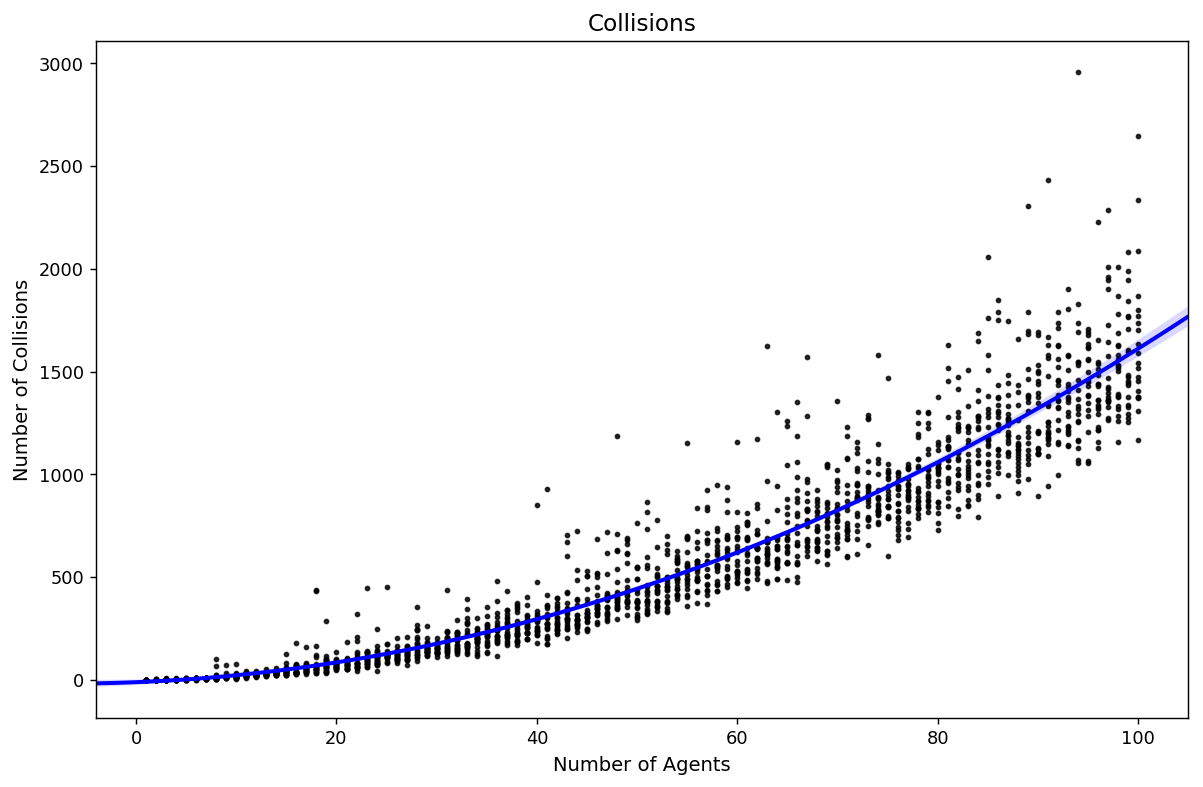
Difficulties (I)
Exponential increase in complexity
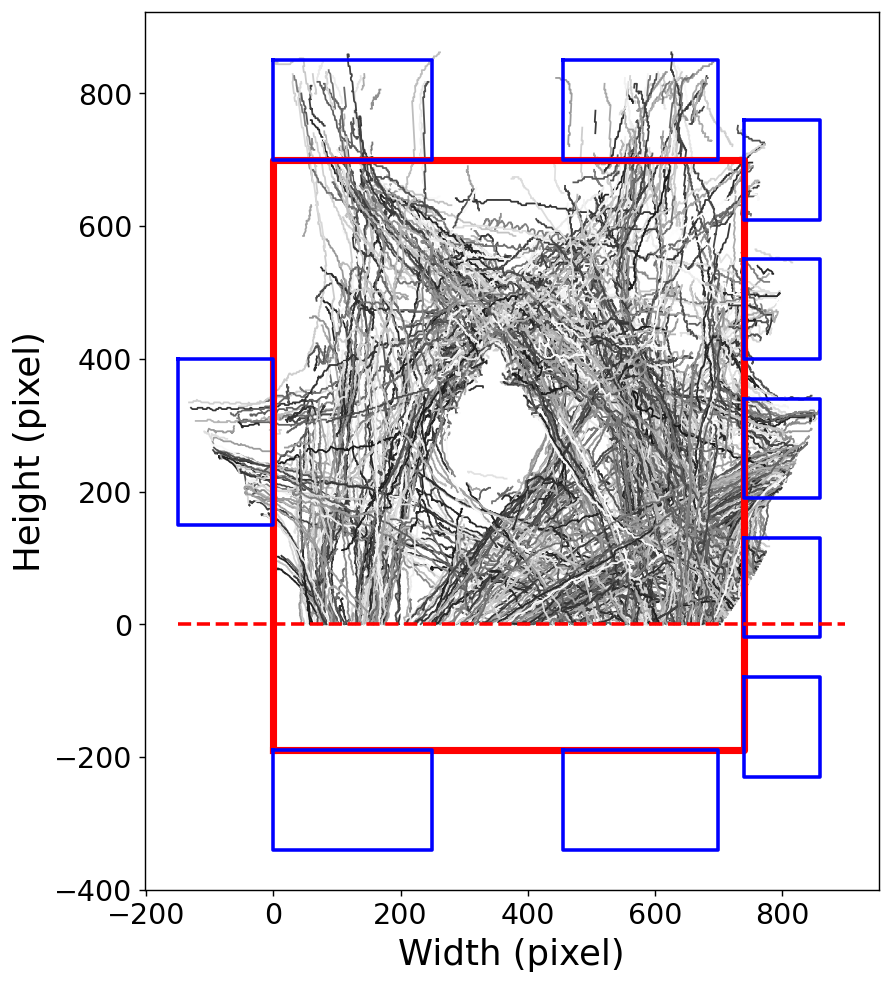
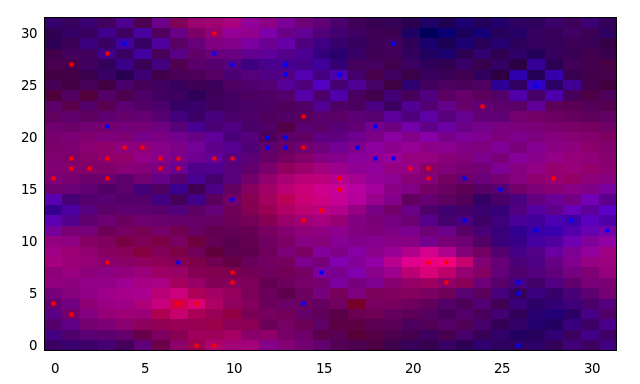
Grand Central Terminal (New York)
Pedestrian traces
B. Zhou, X. Wang and X. Tang. (2012) Understanding Collective Crowd Behaviors: Learning a Mixture Model of Dynamic Pedestrian-Agents. In Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2012
http://www.ee.cuhk.edu.hk/~xgwang/grandcentral.html

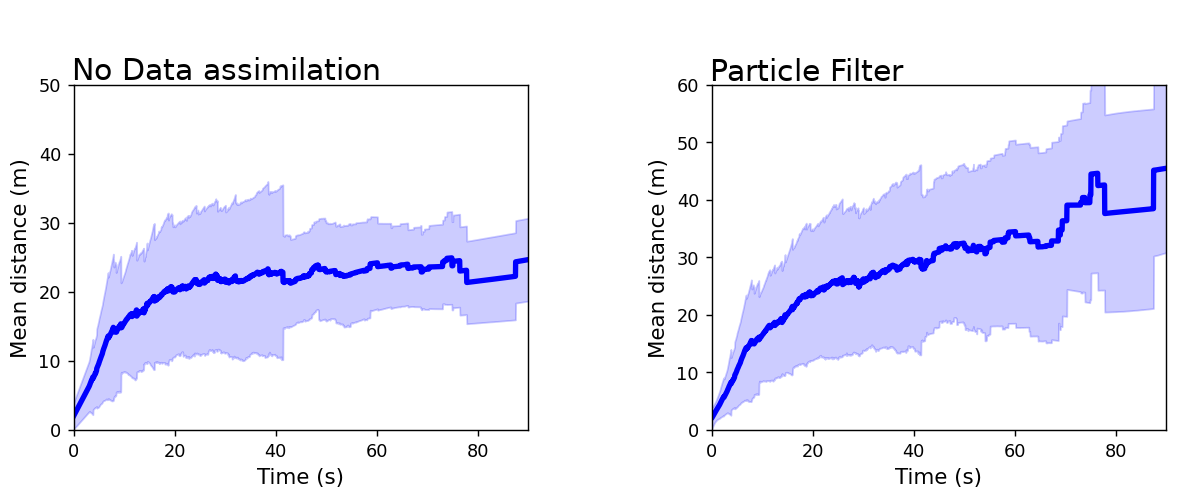
Preliminary Particle Filter Results
Grand Central Station: Filtering makes it worse!
Entrance gate is known; speed and exit gate are unknown
Ternes, P., J. Ward, A. Heppenstall, V. Kumar, Le-Minh Kieu, N. Malleson (2022) Data assimilation and agent-based modelling: towards the incorporation of categorical agent parameters. Open Research Europe 1(131).
Particle Filter & Categorical Parameters
Difficulties (II)
- Exponential increase in complexity
- Categorical Parameters
- Non-linear trajectories (change in categorical parameters)
Categorical-Noise PF Step
Overview
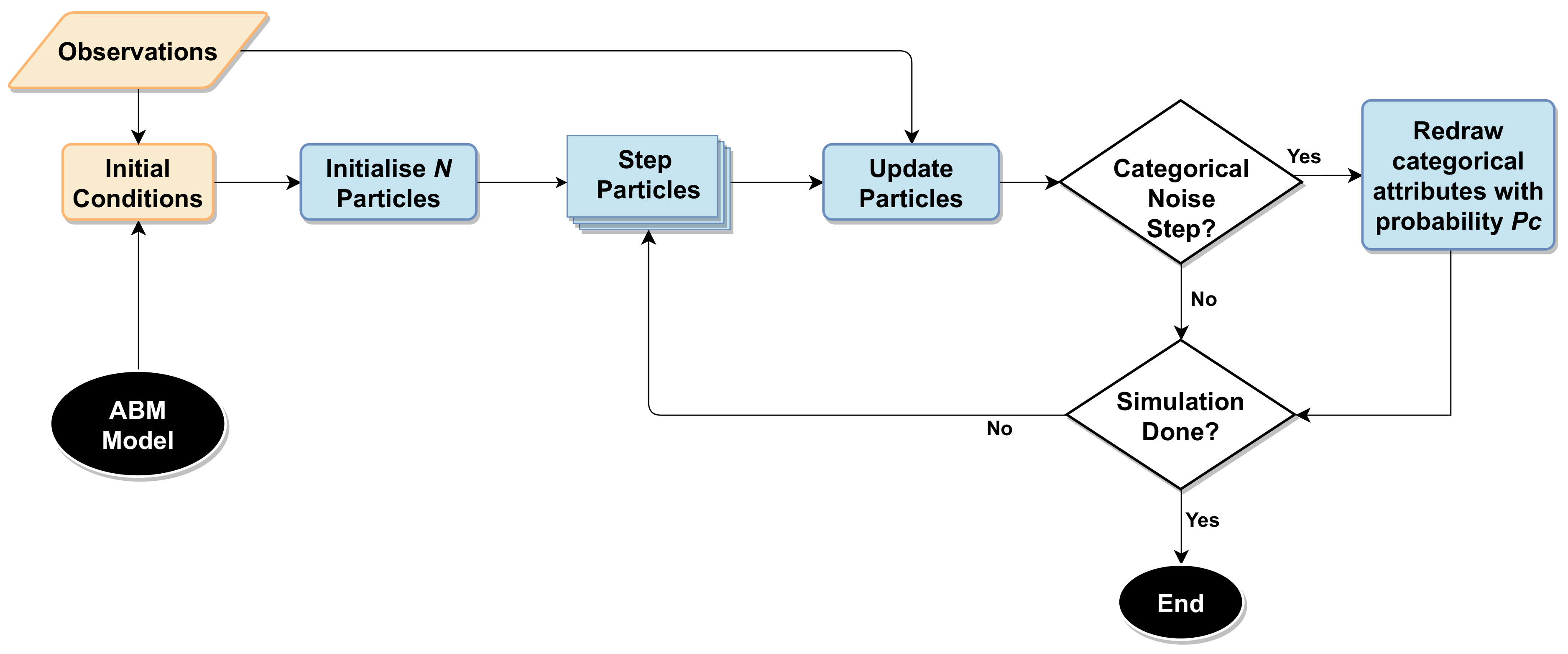
Categorical-Noise PF Step
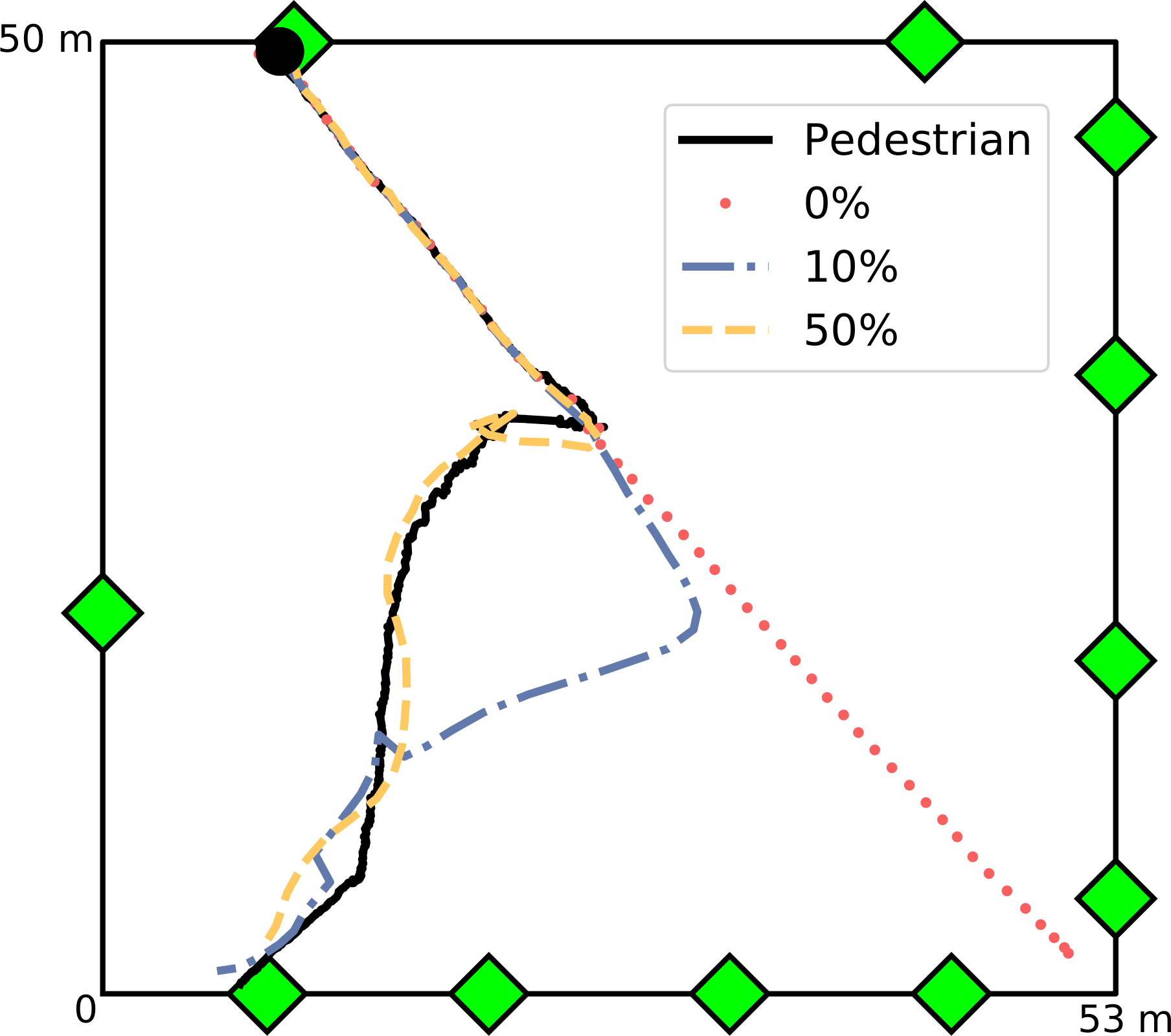
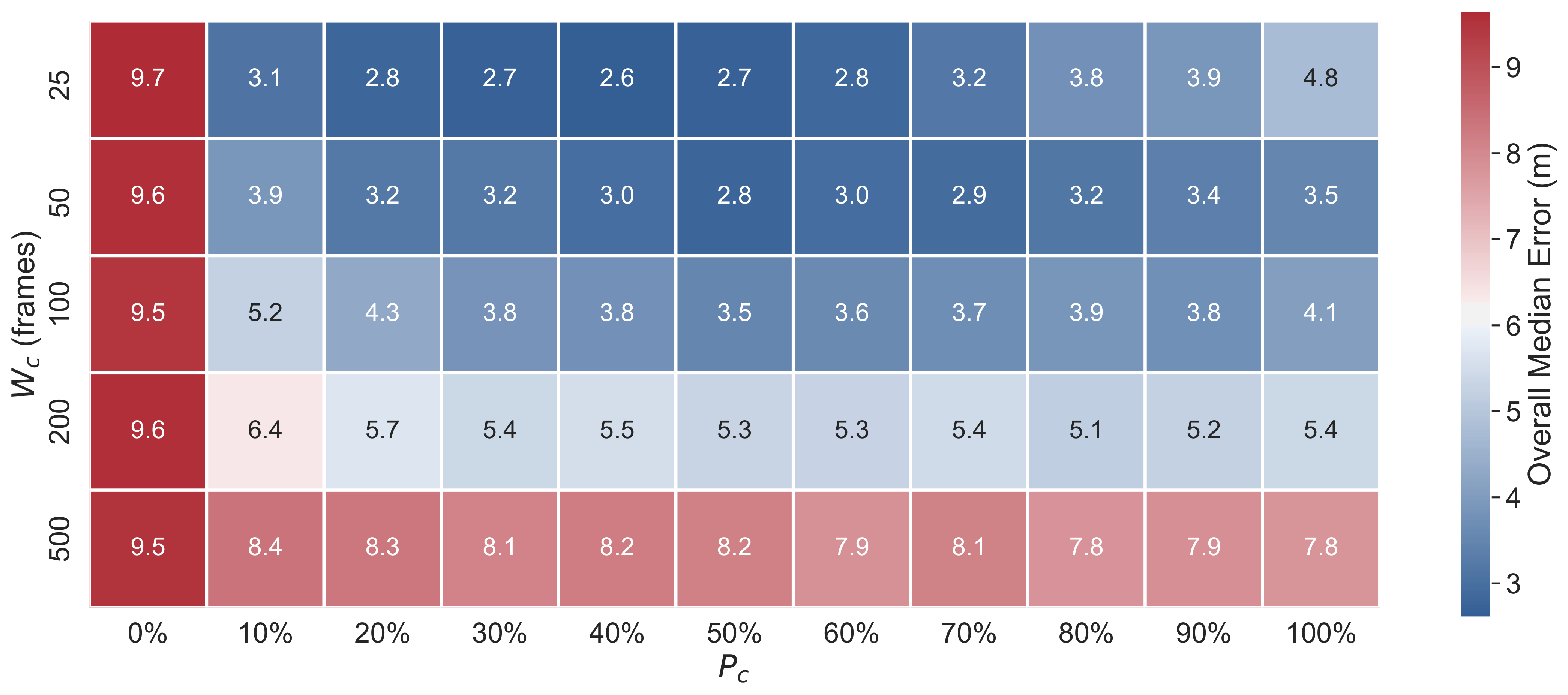
Results
Other DA methods (i)
Unscented Kalman Filter (UKF)
Similar to the (very popular) Ensemble Kalman filter
Should be more efficient
But assumes Gaussian distributions
A few sigma points are chosen to represent the model state
Then some complicated maths happens ...
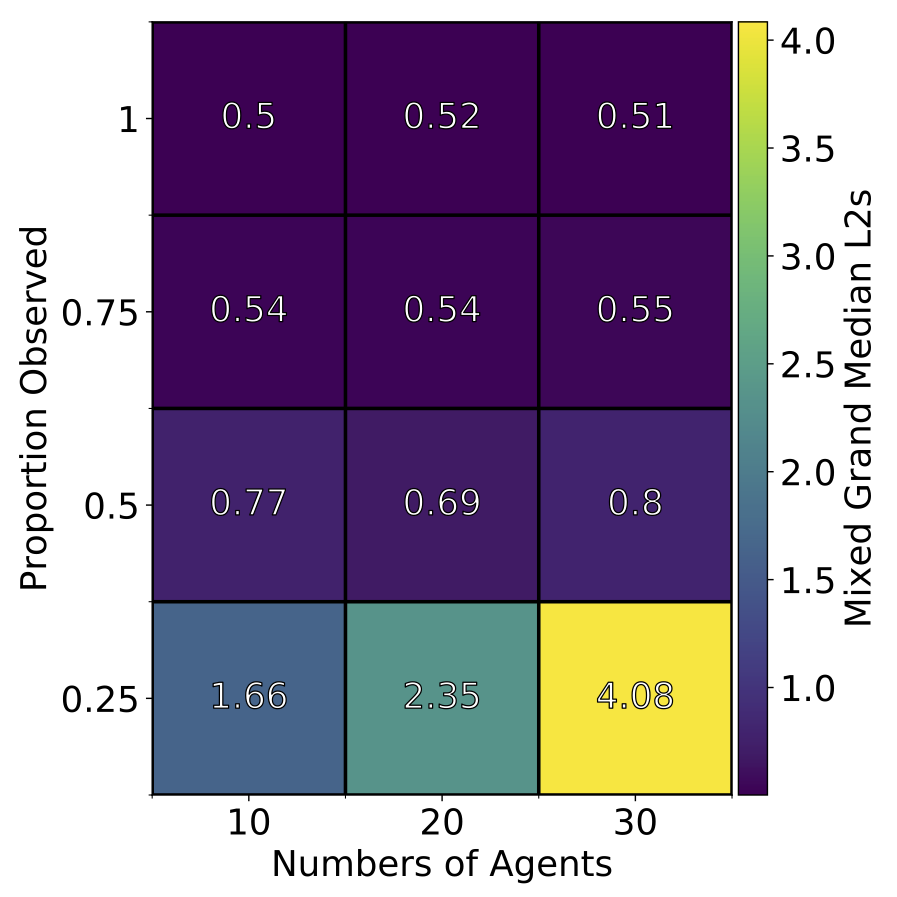
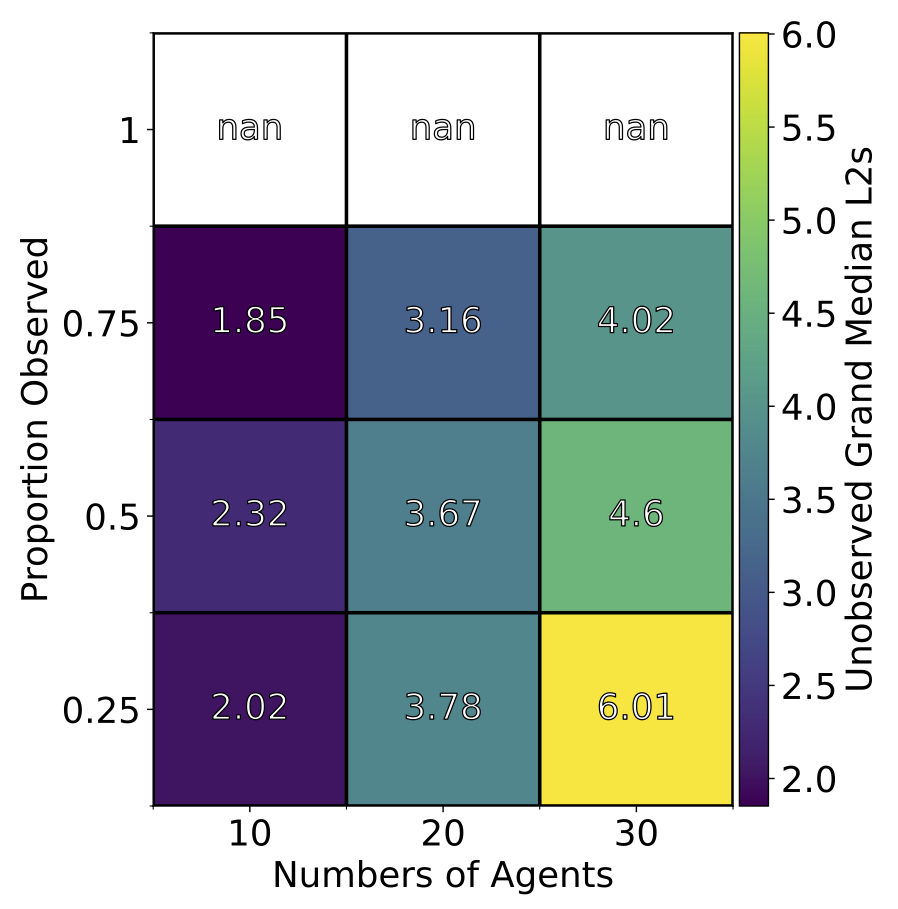
Unscented Kalman Filter (UKF)
Observe a proportion of the agents
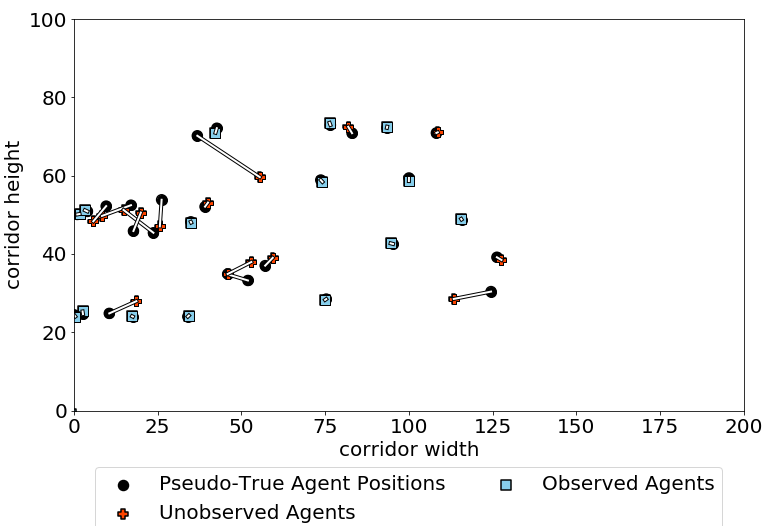
Unscented Kalman Filter (UKF)
Observed v.s. Unobserved agents
Other DA methods (ii)
Monte-Carlo Markov Chain
Tang, D. and N. Malleson (2022). Data assimilation with agent-based models using Markov chain sampling. Open Research Europe 2(70). DOI: 10.12688/openreseurope.14800.1
Define an ABM using a particular scheme (similar to normal ABM definition)
New algorithm to allow efficient sampling from the ABM
Use MCMC to combine the model with data to create a posterior
Monte-Carlo Markov Chain
Posterior estimates of predators and prey
Conclusions
Feeding data into agent-based models is hard!
Computational and methodological challenges
Particle filters work on simple models, but naive filter breaks down
Future Work
Towards Digital Twins of Human Systems
Join up simulations at multiple spatial and temporal resolutions
Real-time analysis tools and virtual labs for policy development
Workshop on Data-Driven Economic
Agent-Based Models (DDEABM)
Sant'Anna School of Advanced Studies, Pisa, 27-28 September 2022
Data Assimilation for Agent-Based Models
Nick Malleson and Patricia Ternes
University of Leeds, UK
n.s.malleson@leeds.ac.uk
Slides available at:
https://urban-analytics.github.io/dust/presentations.html