Alan Turing Institute: AI UK Smart Cities
Simulating the City with AI
Agent-Based Modelling
Alison Heppenstall and Nick Malleson
University of Leeds and The Alan Turing Institute, UK
n.s.malleson@leeds.ac.uk
Slides available at:
https://urban-analytics.github.io/dust/presentations.html
Quantifying Real-Time Urban Dynamics
People are the drivers of processes in cities
We need to understand mobility patterns:
Crime – how many possible victims?
Pollution – who is being exposed? Where are the hotspots?
Economy – can we attract more people to our city centres?
Disease - which times / places have large numbers of interactions
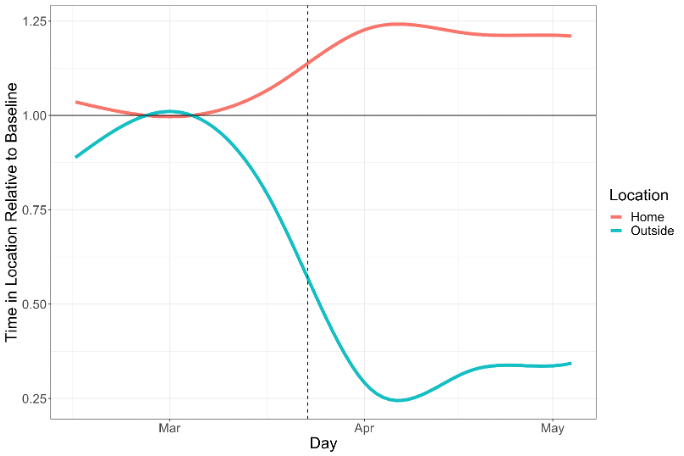
Traditional data may quickly become out of date ...
Agent-Based Modelling
Systems are driven by individuals
(cars, people, ants, trees, whatever)
Individual-level modelling
Rather than controlling from the top, try to represent the individuals
Autonomous, interacting agents
Represent individuals or groups
Situated in a virtual environment
Problem: Models will Diverge
Lots of uncertainties
Inputs (measurement noise)
Parameter values
Model structure
... and that's assuming that the system hasn't changed fundamentally
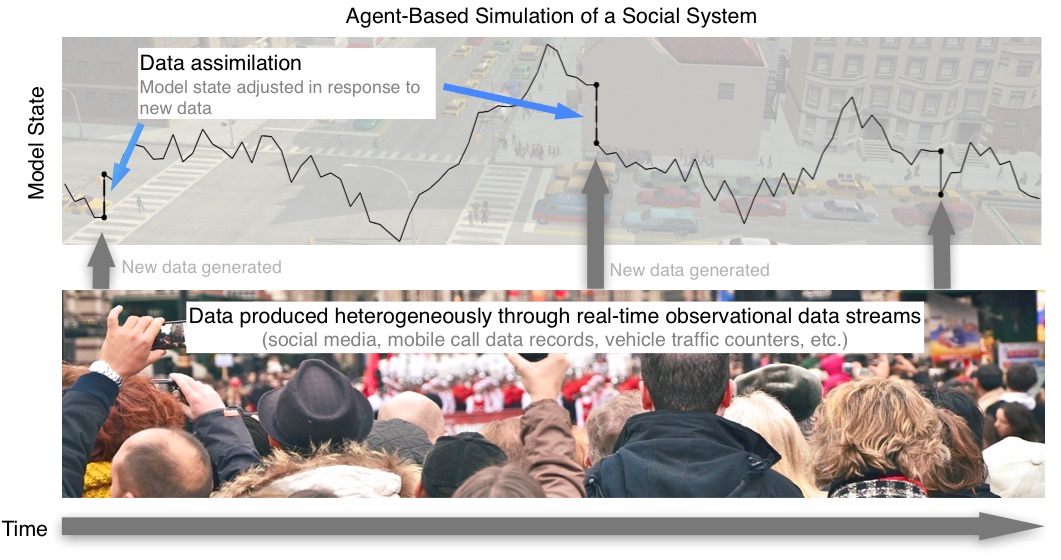
Possible Solution: Data Assimilation
Used in meteorology and hydrology to bring models closer to reality.
Try to improve estimates of the true system state by combining:
Noisy, real-world observations
Model estimates of the system state
Other advantages
Move information from data-rich to data-poor areas
Quantify the uncertainties in the model
I.e. model structure v.s. parameter / variable values
Real Time City Crowd Modelling

Simulating a city in real-time is too hard!! (for now)
For now lets start a crowd
What methods can we use to incorporate data?
How much data do we need?
Track every individual?
Track some individuals?
Just aggregate counts (e.g. number of people passing a footfall camera)
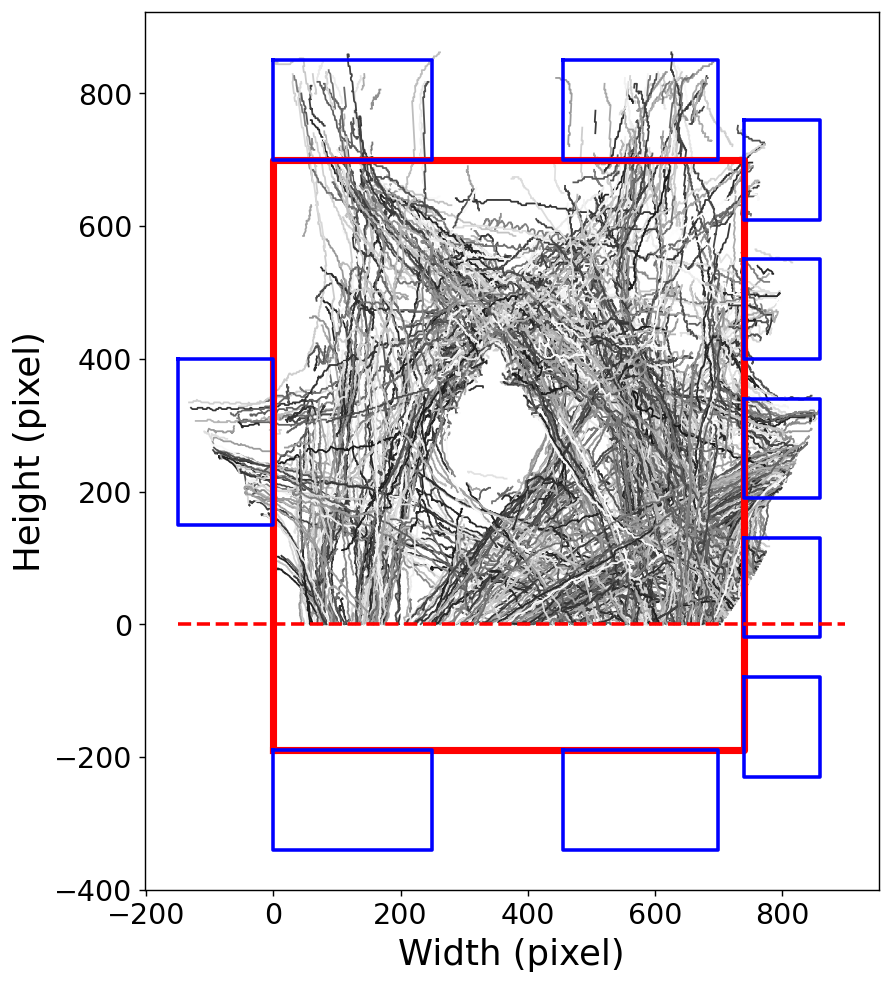
Grand Central Terminal (New York)
Pedestrian traces
B. Zhou, X. Wang and X. Tang. (2012) Understanding Collective Crowd Behaviors: Learning a Mixture Model of Dynamic Pedestrian-Agents. In Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2012
http://www.ee.cuhk.edu.hk/~xgwang/grandcentral.html

Data assimilation with a Particle Filter
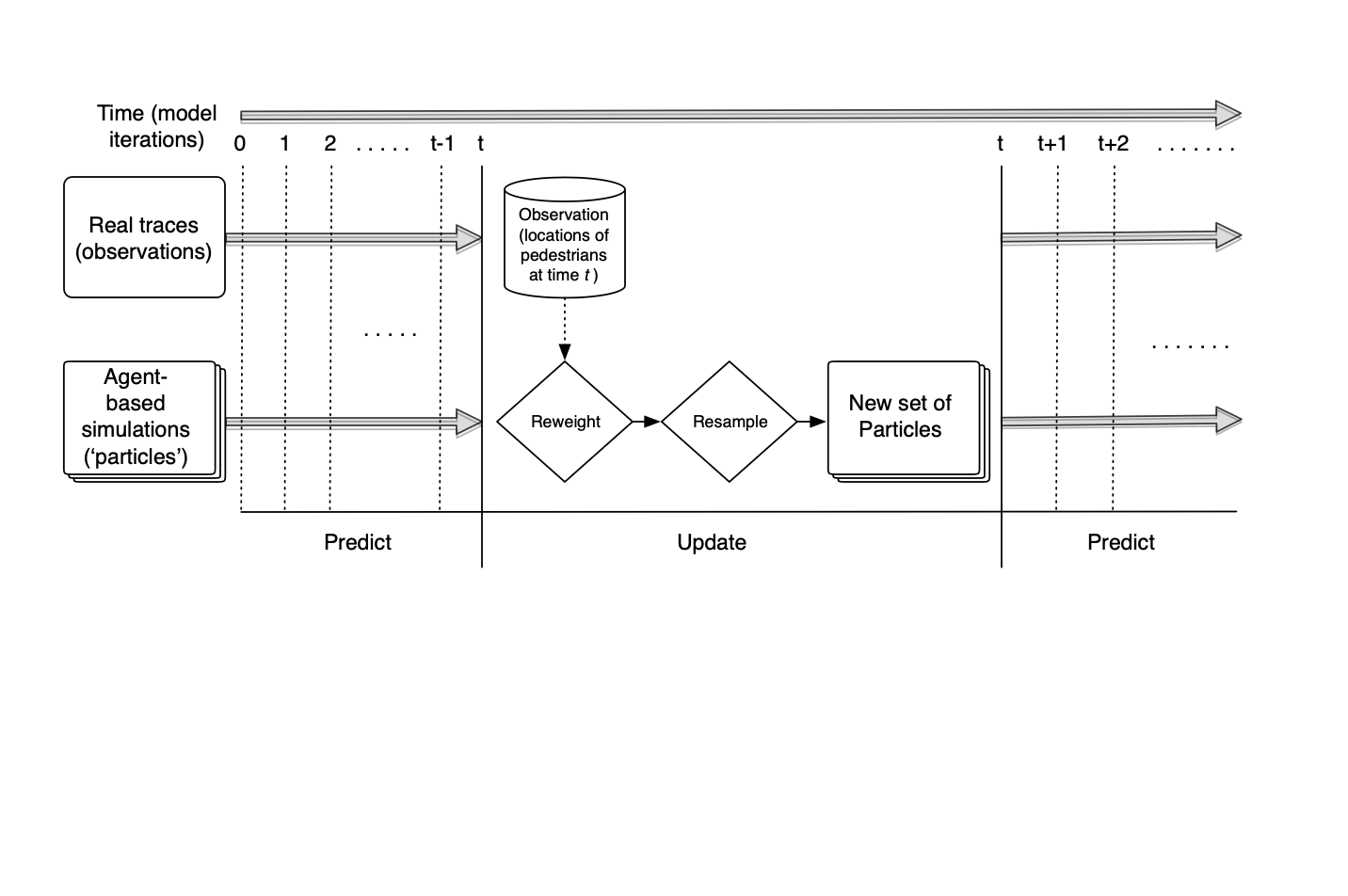
Crowd Simulation with a Particle Filter
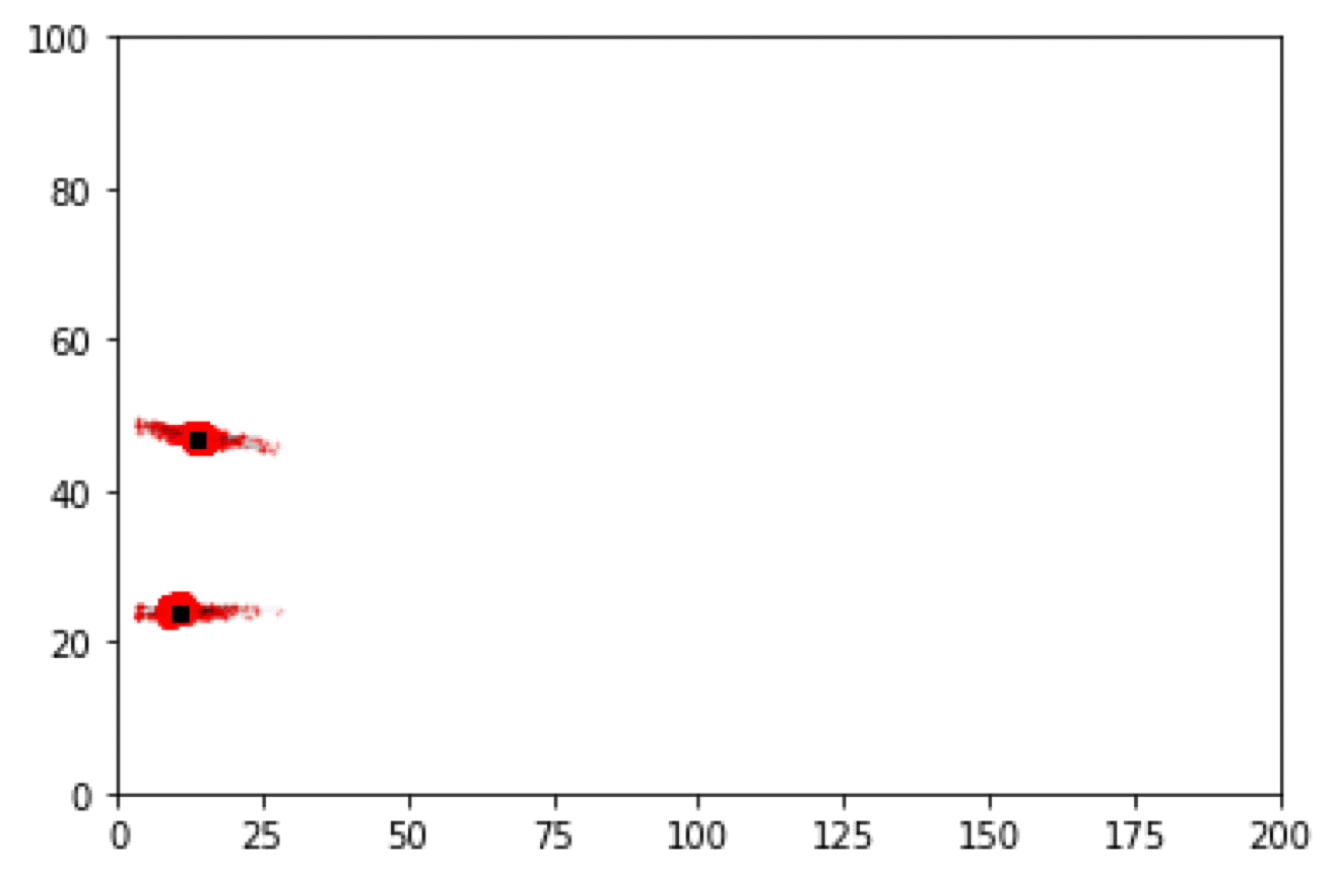
Crowd Simulation with a Particle Filter
Preliminary Particle Filter Results
Box Environment: More particles = lower error
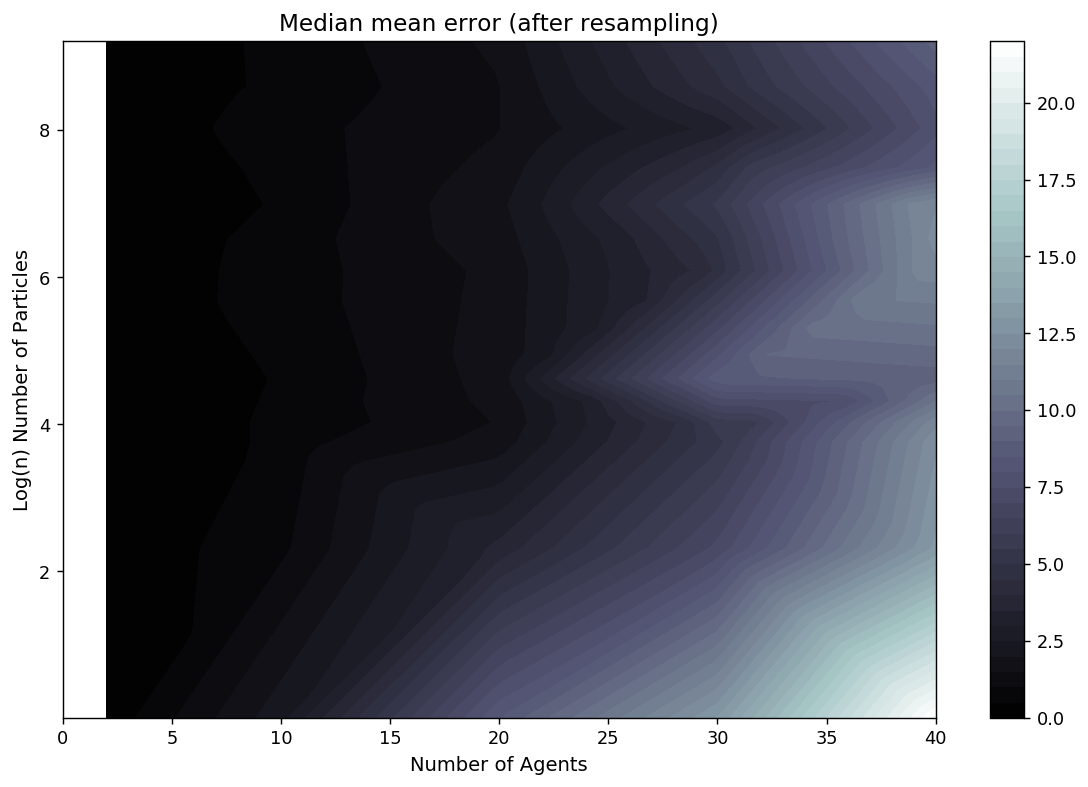
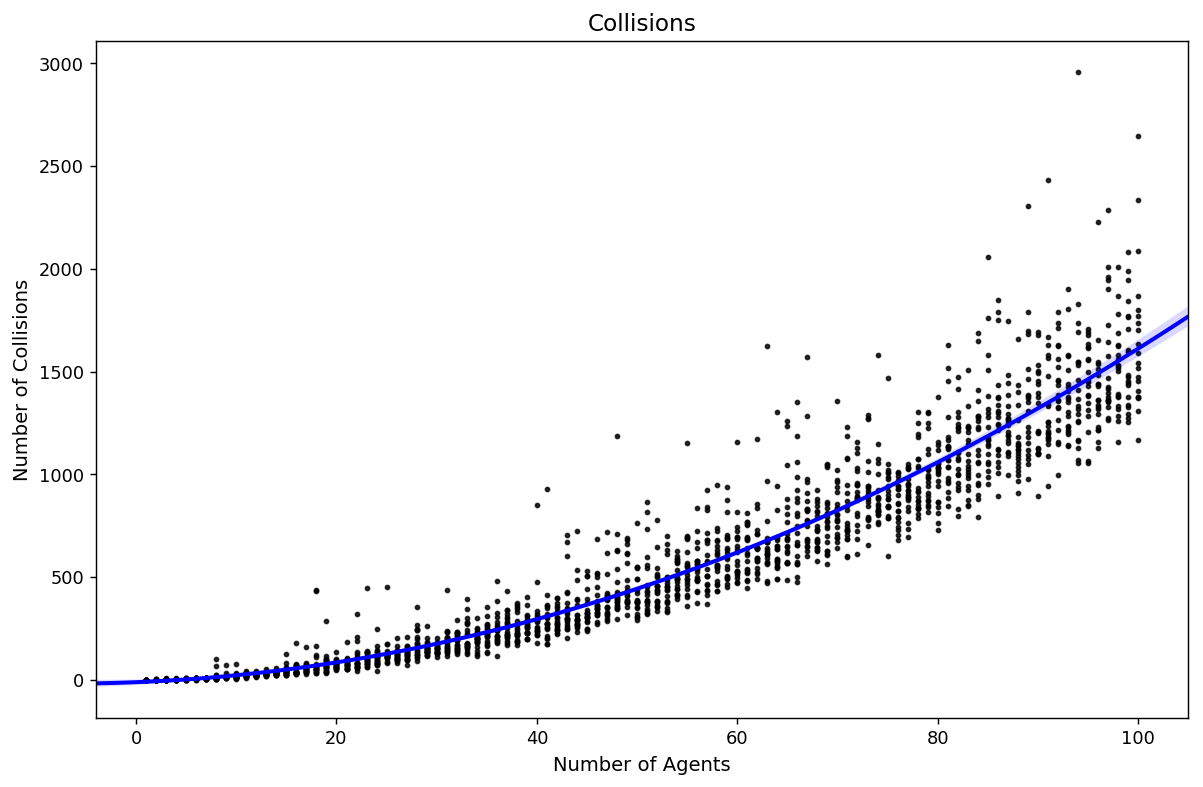
Difficulties (I)
Exponential increase in complexity
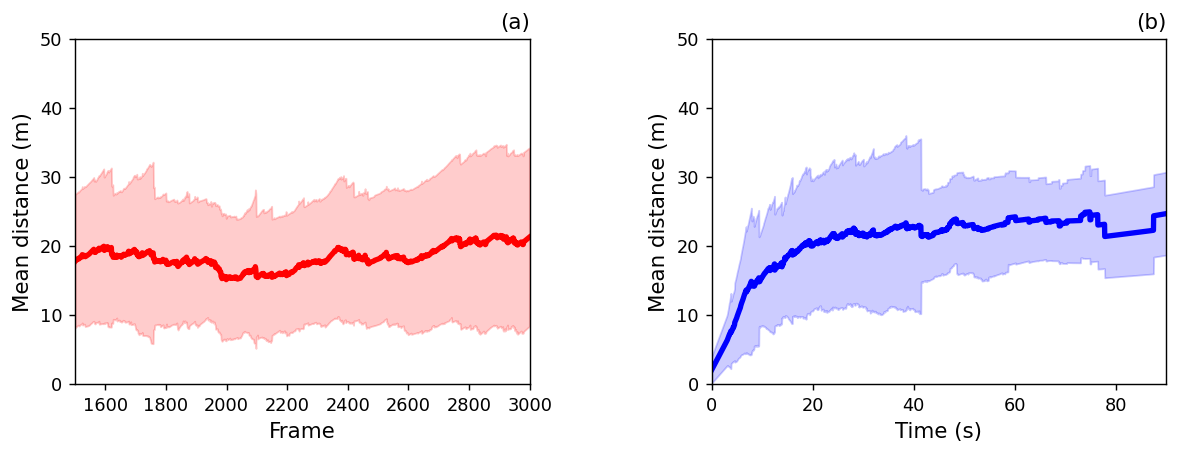
Preliminary Particle Filter Results
Grand Central Station: Filtering makes it worse!
No data assimilation. Entrance gate is known; speed and exit gate are unknown
Ternes, P., J. Ward, A. Heppenstall, V. Kumar, Le-Minh Kieu, N. Malleson (2020) Using data assimilation to reduce uncertainty in an agent-based pedestrian simulations in real time. Under review.
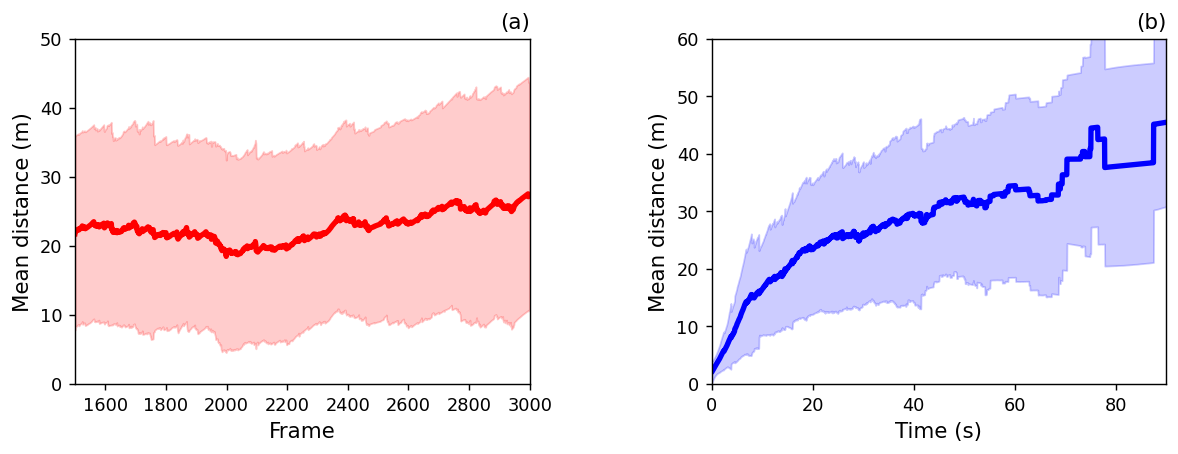
Preliminary Particle Filter Results
Grand Central Station: Filtering makes it worse!
With data assimilation - error increases!
Ternes, P., J. Ward, A. Heppenstall, V. Kumar, Le-Minh Kieu, N. Malleson (2020) Using data assimilation to reduce uncertainty in an agent-based pedestrian simulations in real time. Under review.
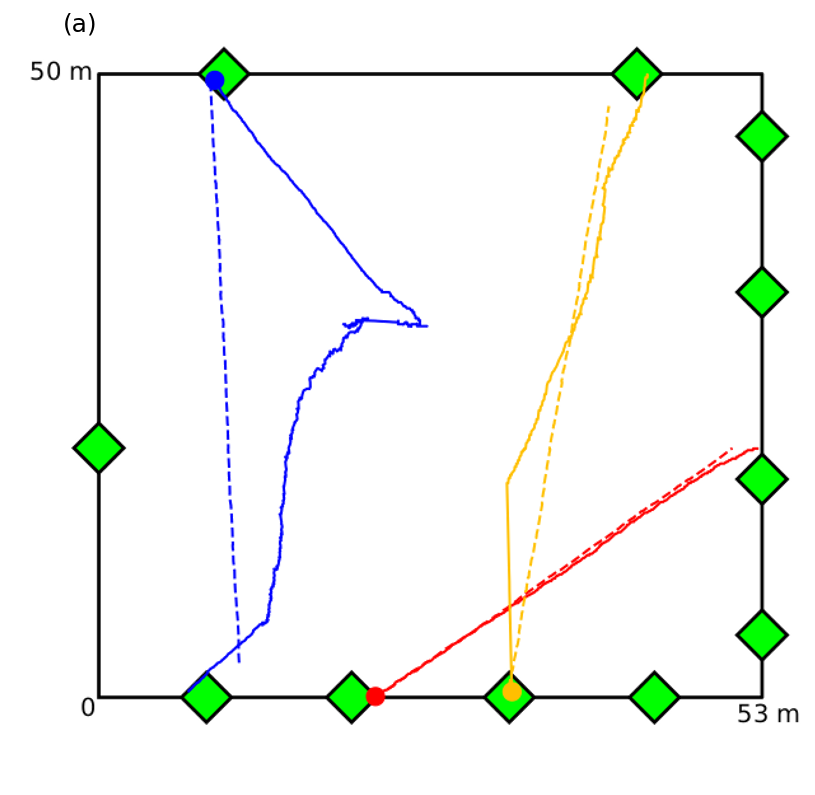
Difficulties (II)
Nonlinear trajectories
Other Methods (ongoing)
Ensemble Kalman Filter
Ward, Jonathan A., Andrew J. Evans, and Nicolas S. Malleson. (2016) Dynamic Calibration of Agent-Based Models Using Data Assimilation. Royal Society Open Science 3(4). DOI: 10.1098/rsos.150703.
Unscented Kalman Filter
Clay, Robert, Le-Minh Kieu, Jonathan A. Ward, Alison Heppenstall, and Nick Malleson (2020) Towards Real-Time Crowd Simulation Under Uncertainty Using an Agent-Based Model and an Unscented Kalman Filter’. In Advances in Practical Applications of Agents, Multi-Agent Systems, and Trustworthiness. The PAAMS Collection 12092:68–79. Lecture Notes in Computer Science. DOI:10.1007/978-3-030-49778-1_6.
Quantum Field Theory - Creation and Annihilation Operators
Tang, Daniel. (2019) Data Assimilation in Agent-Based Models Using Creation and Annihilation Operators. ArXiv:1910.09442 [Cs]. arxiv.org/abs/1910.09442.
Ethical Implications
Data Bias
Need to be very careful: biased data -> biased models
The digital divide
Tracking People
Advantage with these methods is we don't need to track people
Models work with counts of flows
Related Projects
Data Assimilation for Agent-Based Models (DUST)
Create new methods for dynamically assimilating data into agent-based models.
Uncertainty in agent-based models for smart city forecasts
Developing methods that can be used to better understand uncertainty in individual-level models of cities
Conclusions
Feeding data into agent-based models is hard!
Computational and methodological challenges
Particle filters work on simple models, but naive filter breaks down
Future Work
Towards Digital Twins of Human Systems
Join up simulations at multiple spatial and temporal resolutions
Real-time analysis tools and virtual labs for policy development
Alan Turing Institute: AI UK Smart Cities
Simulating the City with AI
Agent-Based Modelling
Alison Heppenstall and Nick Malleson
University of Leeds and The Alan Turing Institute, UK
n.s.malleson@leeds.ac.uk
Slides available at:
https://urban-analytics.github.io/dust/presentations.html