Particle Filters for Smart City Forecasts
Understanding and Quantifying Uncertainty in Agent-Based Models for Smart City Forecasts - Kevin Minors
This post reports on the progress of Kevin Minors’ LIDA data science project (Oct 2018 - Apr 2019) that is part of the Data Assimilation for Agent-Based Modelling (DUST) programme. The original iPython Notebook is available here.
Introduction

Smart cities are increasingly using data to become more efficient and sustainable. One of the difficult questions smart cities want to answer is: how do people behave? One way to solve this issue is to use agent based models. These models use simulated individuals to model the way real human behave, including interactions between individuals and interactions between individuals and the environment.

One common problem with agent based models is that, once started, they evolve independently from changes in the real world. This means they often diverge from the true state of the system. One way to overcome this challenge is to use data assimilation. This process uses observations from the real world to update the agent based model in real time to ensure it remains accurate.

One method of data assimilation is called a particle filter. Particle filters run multiple instances of a model and evolve them forward in time. These individual models are known as ‘particles’. When new observations are received from the real world, the particles are reweighted and resampled so that those that are closer to the new information are more likely to be duplicated and particles that are far away are more likely to be discarded. Below is an example of a particle filter. The dots represent the particles, the blue line represent the true state of the model, and the crosses represent the observations of the true state.

The aim of this project is to apply a particle filter to an agent based model to determine how well it can assimilate data. As we’re not ready to test these methods on models of real systems yet, we run the agent-based model and record the results, which are taken as the ‘reality’. When the particle filter produces results, we compare them to the results from the model recorded as ‘reality’. This is called the ‘identical twin experiment’.
Adapting particle filter from R. Labbe book
The project started with background reading of ‘Kalman and Bayesian Filters in Python’ by Roger Labbe.
https://github.com/rlabbe/Kalman-and-Bayesian-Filters-in-Python
The beginning chapters focus on simple algorithms that combine measurements from sensors and predictions from models to estimate the state of a system, known as a ‘filter’, and they gradually progress to more advanced filters, including a variety of Kalman filters and a particle filter. I decided to focus on the particle filter.
The particle filter chapter in the textbook discusses the general algorithm: generate particles, predict particles forward, update the weights of the particles, resample the particles based on the weights, and then compute state estimates using the particles. The following flow diagram outlines the process of a particle filter.

Initialise particle filter
Begin by setting up all particle filter parameters, variables, and data structures.
Initialise base model
Initialise the model that the particle filter will be trying to simulate. This underlying model will provide the particle filter with information on where all the individuals are, called an ‘observation’.
Step base model
Increment the base model by allowing the model to run one step forward in time.
Step particles
Increment the particles by allowing them to run one step forward in time.
New observation
A new observation is received from the base model after a given number of time steps have passed, called a ‘resample window’. This observation provides the particle filter with the lcoation of the agents in the base model.
Reweight particles
With the new observation, we weight the particles based on how similar they are to the observation. If a particle is very similar to the observation, we give it a large weight. If the particle is very different from the observation, we give it a small weight.
Resample particles
Then, using the new weights, we resample the particles. Particles with large weights are more likely to be duplicated while particles with small weights are more likely to be discarded.
Simulation done
Once all agents in the base model have completed the simulation, the particle filter is finished.
Save/plot details
We finally save and plot any results from the particle filter.
The textbook then moves on to examples of an sequential importance resampling (SIR) particle filter and highlights the problems that occur when there are not enough particles near the target. It finishes with a comparison of the different resampling methods.
The actual particle filter in this chapter is written for a robot moving in an environment filled with landmarks. Below is the code for this particle filter estimating the location of a robot based on distances to numerous landmarks.
Particle filter for robot and landmarks
(This code, which is from Roger Labbe’s Kalman and Bayesian Filters in Python (Chapter 12 - Particle Filters) book, was used as the basis for my own particle filter code).
from numpy.random import uniform
from filterpy.monte_carlo import systematic_resample
from numpy.linalg import norm
from numpy.random import randn
import numpy as np
import scipy.stats
import matplotlib.pyplot as plt
from numpy.random import seed
def create_uniform_particles(x_range, y_range, hdg_range, num_of_particles):
'''
Create Uniformly Distributed Particles
PARAMETERS
- x_range: Interval of x values for particle locations
- y_range: Interval of y values for particle locations
- hdg_range: Interval of heading values for particles in radians
- num_of_particles: Number of particles
DESCRIPTION
Create N by 3 array to store x location, y location, and heading
of each particle uniformly distributed. Take modulus of heading to ensure heading is
in range [0,2*pi).
Returns particle locations and headings
'''
particles = np.empty((num_of_particles, 3))
particles[:, 0] = uniform(x_range[0], x_range[1], size = num_of_particles)
particles[:, 1] = uniform(y_range[0], y_range[1], size = num_of_particles)
particles[:, 2] = uniform(hdg_range[0], hdg_range[1], size = num_of_particles)
particles[:, 2] %= 2 * np.pi
return particles
def predict(particles, control_input, std, dt=1.):
'''
Predict particles
PARAMETERS
- particles: Locations and headings of all particles
- control_input: Heading, x location step, and y location step to predict particles
- std: Standard deviation for noise added to prediction
- dt: Time step
DESCRIPTION
Predict particles forward one time step using control input u
(heading, x step, y step) and noise with standard deviation std.
'''
num_of_particles = len(particles)
# update heading
particles[:, 2] += control_input[0] + (randn(num_of_particles) * std[0])
particles[:, 2] %= 2 * np.pi
# calcualte change in x and y directions
xdist = (control_input[1] * dt) + (randn(num_of_particles) * std[1])
ydist = (control_input[2] * dt) + (randn(num_of_particles) * std[2])
# add changes to current x and y locations
particles[:, 0] += xdist
particles[:, 1] += ydist
# uncomment below when u = (heading, velocity) to predict
# particles using a velocity rather than an x and y change.
#
#dist = (u[1] * dt) + (randn(num_of_particles) * std[1])
#particles[:, 0] += np.cos(particles[:,2])*dist
#particles[:, 1] += np.sin(particles[:,2])*dist
def update(particles, weights, observation, sensor_std, landmarks):
'''
Update particle weights
PARAMETERS
- particles: Locations and headings of all particles
- weights: Weights of all particles
- observation: Observation of distances between robot and all landmarks
- sensor_std: Standard deviation for error in sensor for observation
- landmarks: Locations of all landmarks
DESCRIPTION
Set all weights to 1. For each landmark, calculate the distance between
the particles and that landmark. Then, for a normal distribution with mean
= distance and std = sensor_std, calculate the pdf for a measurement of observation.
Multiply weight by pdf. If observation is close to distance, then the
particle is similar to the true state of the model so the pdf is close
to one so the weight stays near one. If observation is far from distance,
then the particle is not similar to the true state of the model so the
pdf is close to zero so the weight becomes very small.
The distance variable depends on the particles while the z parameter depends
on the robot.
'''
weights.fill(1.)
for i, landmark in enumerate(landmarks):
distance = np.linalg.norm(particles[:, 0:2] - landmark, axis=1)
weights *= scipy.stats.norm(distance, sensor_std).pdf(observation[i])
weights += 1.e-300 # avoid round-off to zero
weights /= sum(weights) # normalize
def effective_n(weights):
'''
Calculate effective N
PARAMETERS
- weights: Weights of all particles
DESCRIPTION
Calculates effective N, an approximation for the number of particles
contributing meaningful information determined by their weight. When
this number is small, the particle filter should resample the particles
to redistribute the weights among more particles.
Returns effective N.
'''
return 1. / np.sum(np.square(weights))
def resample_from_index(particles, weights, indexes):
'''
Resample particles by index
PARAMETERS
- particles: Locations and headings of all particles
- weights: Weights of all particles
- indexes: Indexes of particles to be resampled
DESCRIPTION
Resample particles and the associated weights using indexes. Reset
weights to 1/N = 1/len(weights).
'''
particles[:] = particles[indexes]
weights[:] = weights[indexes]
weights.fill (1.0 / len(weights))
def estimate(particles, weights):
'''
Estimate state of system
PARAMETERS:
- particles: Locations and headings of all particles
- weights: Weights of all particles
DESCRIPTION
Estimate the state of the system by calculating the mean and variance
of the weighted particles.
Returns mean and variance of the particle locations
'''
pos = particles[:, 0:2]
mean = np.average(pos, weights=weights, axis=0)
var = np.average((pos - mean)**2, weights=weights, axis=0)
return mean, var
def run_textbook_particle_filter(num_of_particles,
num_of_iterations = 20,
sensor_std = .1,
do_plot = True,
plot_particles = False):
'''
Run the particle filter
PARAMETERS
- num_of_particles: Number of particles
- num_of_iterations: Number of iterations for particle filter
- sensor_std: Standard deviation for error of sensor
- do_plot: Boolean variable to plot particle filter results
- plot_particles: Boolean variable to plot each particle
DESCRIPTION
Set locations for landmarks, particle locations, and particle weights.
Plot individual particles initially. Set robot location. For each
iteration, increment the robot location, take observation with noise
for distance between robot and landmarks, predict particles forward,
update particle weights. If effective N is small enough, resample
particles. Calculate estimates and save the particle mean. Plot
results and print final error statistics.
'''
landmarks = np.array([[-1, 0], [2, 3], [-1,15], [2,36]])
num_of_landmarks = len(landmarks)
plt.figure()
# create particles
particles = create_uniform_particles((0,20), (0,20), (0, 6.28), num_of_particles)
weights = np.zeros(num_of_particles)
# plot particles
if plot_particles:
alpha = .20
if num_of_particles > 5000:
alpha *= np.sqrt(5000)/np.sqrt(num_of_particles)
plt.scatter(particles[:, 0], particles[:, 1], alpha=alpha, color='g')
means = []
robot_position = np.array([0., 0.])
# loop through iterations
for iteration in range(num_of_iterations):
# increment robot location
robot_position += (1, 1)
# distance from robot to each landmark
observation = (norm(landmarks - robot_position, axis=1) +
(randn(num_of_landmarks) * sensor_std))
# move diagonally forward
predict(particles, control_input=(0.00, 1., 1.), std=(.2, 5, 5))
# incorporate measurements
update(particles, weights, observation=observation, sensor_std=sensor_std,
landmarks=landmarks)
# resample if too few effective particles
if effective_n(weights) < num_of_particles/2:
indexes = systematic_resample(weights)
resample_from_index(particles, weights, indexes)
# calculate and save estimates
mean, variance = estimate(particles, weights)
means.append(mean)
if plot_particles:
plt.scatter(particles[:, 0], particles[:, 1],
color='k', marker=',', s=1)
p1 = plt.scatter(robot_position[0], robot_position[1], marker='+',
color='k', s=180, lw=3)
p2 = plt.scatter(mean[0], mean[1], marker='s', color='r')
means = np.array(means)
plt.legend([p1, p2], ['Actual', 'PF'], loc=4, numpoints=1)
print('final position error, variance:\n\t',
mean - np.array([num_of_iterations, num_of_iterations]), variance)
plt.show()
seed(2)
run_textbook_particle_filter(num_of_particles=5000, plot_particles=False)
final position error, variance:
[ 0.09280355 -0.17494662] [0.00577109 0.01313016]
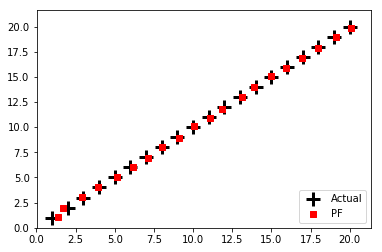
It is very example specific. Hence, my first task was to rewrite the particle filter for a more general model. To do this, I had to determine which parts of the example particle filter were specific to the example and which were necessary for the particle filter itself. Once I detached the particle from that example, I then realised that a particle cannot work without some underlying model. So I created a model of a single object moving in a line. In this code, there are no other methods. Everything is contained within the particle filter.
Below is the code for a particle filter estimating the location of an object moving with linear motion.
Particle Filter with linear motion
(This code was adapted from Roger Labbe’s Kalman and Bayesian Filters in Python (Chapter 12 - Particle Filters) book).
import numpy as np
import matplotlib.pyplot as plt
import random
from numpy.random import uniform
from numpy.random import randn
from scipy.stats import norm
def run_linear_particle_filter(number_of_particles = 1000,
number_of_iterations = 20,
initial_particle_x_range = [-1,1],
initial_particle_y_range = [-1,1],
initial_object_location = [0,0],
object_location_change = [1,1],
sensor_std = .1,
particle_std = .1):
'''
Run particle filter created by Kevin Minors
PARAMETERS
- number_of_particles: Number of particles in filter
- number_of_iterations: Number of iterations in filter
- initial_particle_x_range: Initial x range for particles
- initial_particle_y_range: Initial y range for particles
- initial_object_location: Initial location of object
- object_location_change: Change in object location per step
- sensor_std: Standard deviation for sensor
- particle_std: Standard deviation for particles
DESCRIPTION
A particle filter created to estimate the location of
an object with linear motion. There is uncertainty in
the system behaviour when we move the particles and
there is uncertainty in the sensor when we measure
the distance between particles and the object.
'''
# Create an empty array for the location of each particle,
# storing x coordinates in column 0, y coordinates
# in column 1
particle_locations = np.empty((number_of_particles, 2))
# Distribute x and y coordinates uniformly over
# x range and y range
particle_locations[:, 0] = uniform(initial_particle_x_range[0],
initial_particle_x_range[1],
size = number_of_particles)
particle_locations[:, 1] = uniform(initial_particle_y_range[0],
initial_particle_y_range[1],
size = number_of_particles)
# Set particle weights
particle_weights = np.zeros(number_of_particles)
# Create array for the mean of the particle locations
object_location = initial_object_location
particle_means = np.zeros((number_of_iterations+1,2))
object_locations = np.zeros((number_of_iterations+1,2))
particle_means[0,:] = [object_location[0],object_location[1]]
object_locations[0,:] = [object_location[0],object_location[1]]
# Loop through time steps
for iteration in range(number_of_iterations):
# Move object
object_location[0] += object_location_change[0]
object_location[1] += object_location_change[1]
object_locations[iteration+1,:] = [object_location[0],object_location[1]]
# Move particles according to object
# dynamics
particle_locations[:,0] += object_location_change[0]
+ randn(number_of_particles)*particle_std
particle_locations[:,1] += object_location_change[1]
+ randn(number_of_particles)*particle_std
# Update particle weights according to
# measurements
distance_between_particles_object = abs(
np.linalg.norm(particle_locations - object_location, axis=1)
+ randn(number_of_particles)*sensor_std)
particle_weights.fill(1.)
particle_weights *= 1. / (distance_between_particles_object + 1.e-300)
particle_weights /= sum(particle_weights)
# Resample particles based on weights
# Possibly add in if statement to only resample when weights are small enough
random_offset = random.random()
random_positions = [(x + random_offset)/number_of_particles
for x in list(range(number_of_particles))]
# Calculate where in the cumsum these
# random positions lie and pick that
# particle to be sampled.
cumulative_sum = np.cumsum(particle_weights)/sum(particle_weights)
particle_choices = np.zeros(number_of_particles, 'i')
i, j = 0, 0
while i < number_of_particles:
if random_positions[i] < cumulative_sum[j]:
particle_choices[i] = j
i += 1
else:
j += 1
particle_locations[:] = particle_locations[particle_choices]
particle_weights[:] = particle_weights[particle_choices]
# Calculate mean and variance of
# particles
mean = np.average(particle_locations, weights=particle_weights, axis=0)
var = np.average((particle_locations - mean)**2, weights=particle_weights, axis=0)
# Record particle locations
particle_means[iteration+1,:] = [mean[0],mean[1]]
# Plot particle means and object locations
plt.figure()
plt.scatter(object_locations[:,0], object_locations[:,1], color = 'k', marker = '+')
plt.scatter(particle_means[:,0], particle_means[:,1], color = 'r', marker = 'o')
plt.legend(['Object', 'Particle Mean'])
plt.show()
print('Final location error = ', np.linalg.norm(mean - object_location, axis=0))
print('Final variance in particles = ', var)
run_linear_particle_filter()
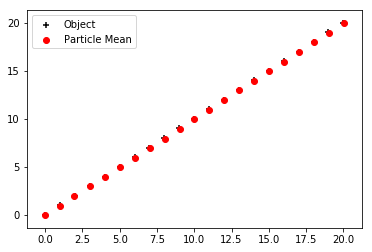
Final location error = 0.047750971613814246
Final variance in particles = [1.81753553e-27 9.89547120e-27]
Detangling the particle filter from the example proved more difficult than expected. Many of the problems I faced initially doing this was not from the particle filter itself but from the underlying model and the communication between the two.
Once I finished this stage of the particle filter and model, I then upgraded the underlying model to include nonlinear movement. These updates made the underlying model closer to the actual model we were working with. Then, we wanted to take it one step further so that the particle filter only interacts with the underlying model through a ‘step’ function that increments the underlying model forward in time. When this step function is called on the base model or a particle, it increments them by one time step. This way, there is very little interaction between the underlying model and the particle filter so the particle filter can easily be attached to a different underlying model. The only requirement is that the model has a ‘step’ function.
Below is the code for a particle filter estimating the location of an object moving with a step function and matrix transition function.
Particle Filter with a step function and matrix transition
import numpy as np
import matplotlib.pyplot as plt
import random
import math
from numpy.random import uniform
from numpy.random import randn
from scipy.stats import norm
def step(state):
'''
Step function
PARAMETERS
- model_state: The state of the system to be incremented by one time step
DESCRIPTION
A step function to increment the state by one time step. Depending on the
dimension of the system, the function increments using different matrices.
The state is multiplied by the transition matrix and then some randomness
is added.
Returns the new state of the system.
'''
dimension = len(state)
if dimension == 3:
state_transition = [[0.3,-0.4,0.1],
[-0.6,.8,-.6],
[0.7,-0.1,0.1]]
elif dimension == 2:
state_transition = [[1,.5],
[.5,1]]
state_std = 1
state_noise = randn(dimension)
return np.matmul(state_transition, state) + state_noise*state_std
def run_step_particle_filter(initial_model_state = [1,1],
number_of_particles = 1000,
number_of_iterations = 20,
initial_particle_distribution_std = 1,
particle_model_behaviour_std = .1):
'''
Run particle filter with step function
PARAMETERS
- initial_model_state: Initial state of the model
DESCRIPTION
A particle filter created to estimate the location of
an object with linear or nonlinear motion. There is uncertainty in
the system behaviour when we move the particles and
there is uncertainty in the sensor when we measure
the distance between particles and the object.
'''
dimensions = len(initial_model_state)
model_state = initial_model_state
particle_weights = np.ones(number_of_particles)
particle_locations = np.empty((number_of_particles, dimensions))
# set particle locations to initial model state with noise
for dimension in range(dimensions):
particle_locations[:,dimension] = (initial_model_state[dimension]
+ initial_particle_distribution_std*randn(number_of_particles))
# set mean
particle_means = np.zeros((number_of_iterations, dimensions))
mean = np.average(particle_locations, weights=particle_weights, axis=0)
particle_means[0,:] = mean[:]
plt.figure()
plt.scatter(model_state[0], model_state[1], color = 'k', marker = '+')
for iteration in range(number_of_iterations-1):
# step model and particles
model_state = step(model_state)
for particle in range(number_of_particles):
particle_locations[particle,:] = (step(particle_locations[particle,:])
+ randn(dimensions)*particle_model_behaviour_std)
# calculate distance between state and particles and then weights
distance = np.linalg.norm(particle_locations - model_state,axis=1)
particle_weights = 1 / (distance + 1e-99)
# resample particles using systematic resampling
random_offset = random.random()
random_partition = [ (x + random_offset) / number_of_particles
for x in list(range(number_of_particles))]
cumulative_sum = np.cumsum(particle_weights) / sum(particle_weights)
i, j = 0, 0
particle_indexes = np.zeros(number_of_particles, 'i')
while i < number_of_particles:
if random_partition[i] < cumulative_sum[j]:
particle_indexes[i] = j
i += 1
else:
j += 1
particle_locations[:] = particle_locations[particle_indexes]
particle_weights[:] = particle_weights[particle_indexes]
# save mean and variance of resampled particles
mean = np.average(particle_locations,weights=particle_weights, axis=0)
variance = np.average((particle_locations- mean)**2,weights=particle_weights,axis=0)
particle_means[iteration+1,:] = mean[:]
plt.scatter(model_state[0], model_state[1], color = 'k', marker = '+')
# Plot everything
plt.scatter(particle_means[:,0], particle_means[:,1], color = 'r', marker = 'o')
plt.gca().set_aspect('equal', 'datalim')
plt.gcf().set_size_inches(10, 8)
plt.show()
print('Final location error = ', np.linalg.norm(mean - model_state, axis=0))
print('Final std in particle location = ', variance**0.5)
run_step_particle_filter()
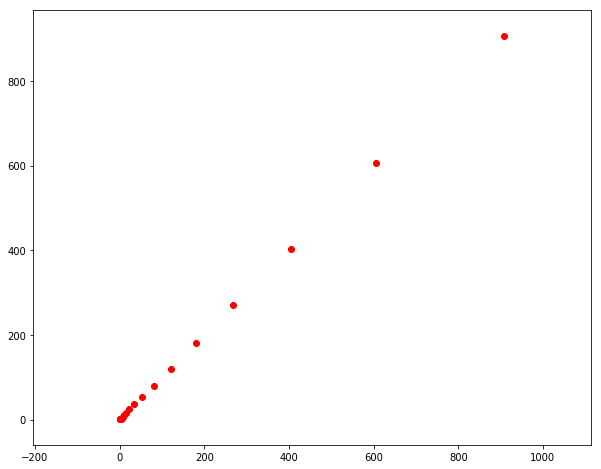
Final location error = 0.1053703991747064
Final std in particle location = [0.35683619 0.43830442]
Rewriting the particle filter for StationSim
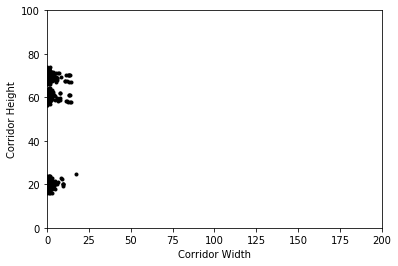
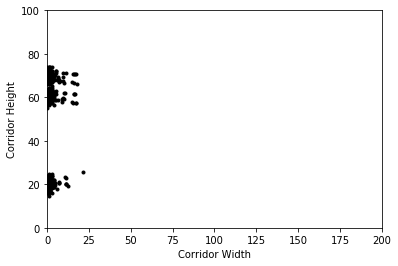
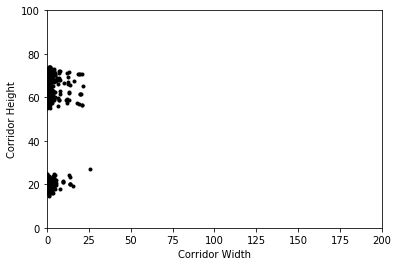
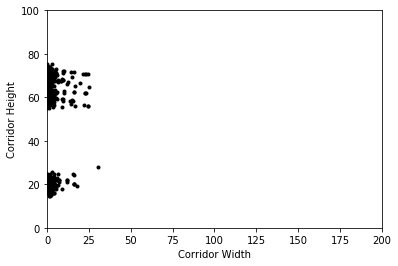
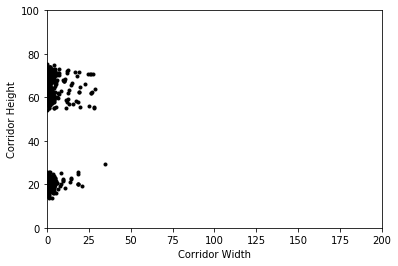
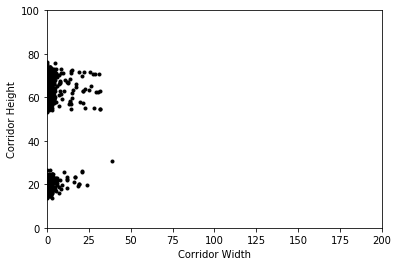
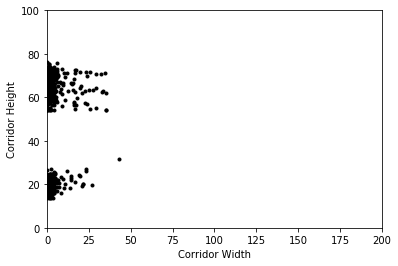
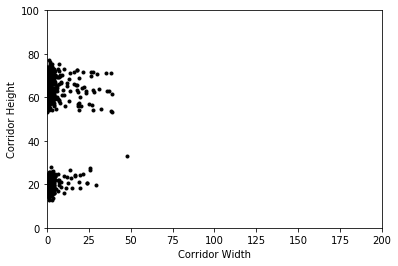
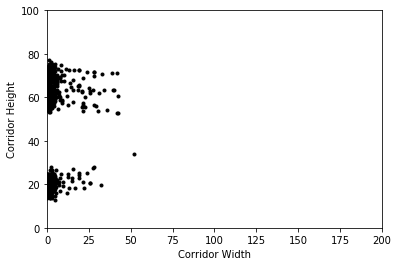
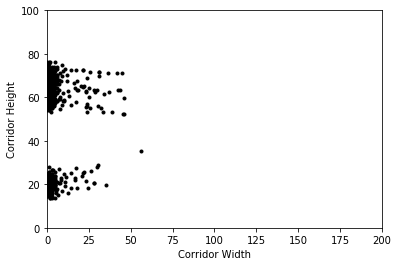
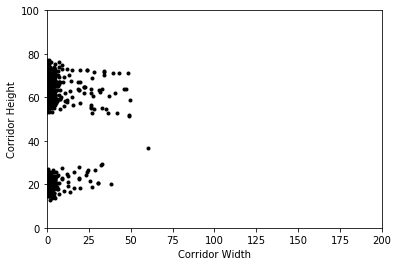
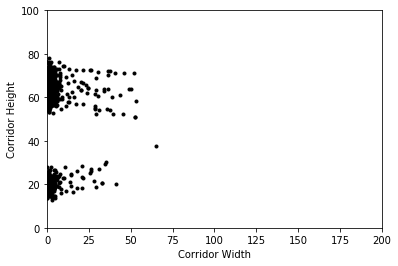
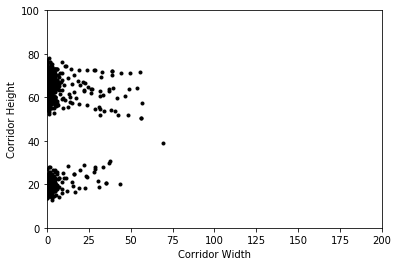
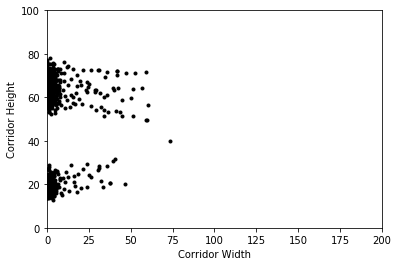
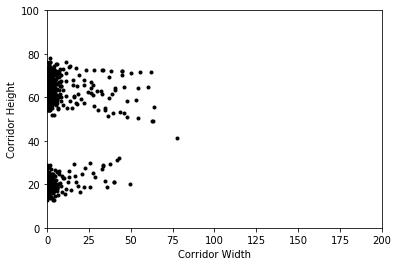
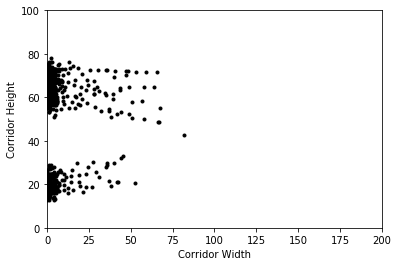
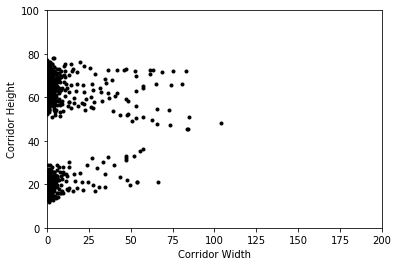
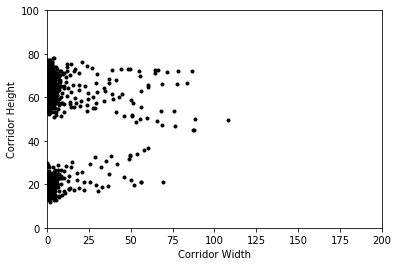
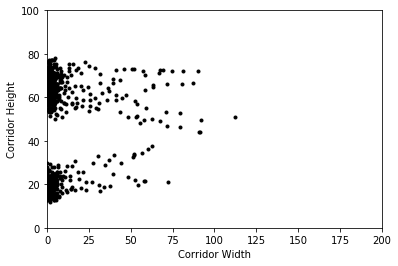
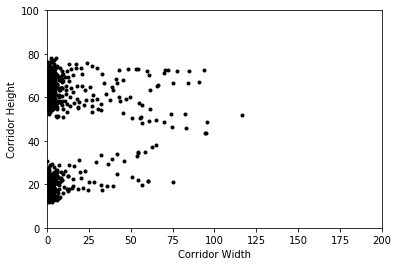
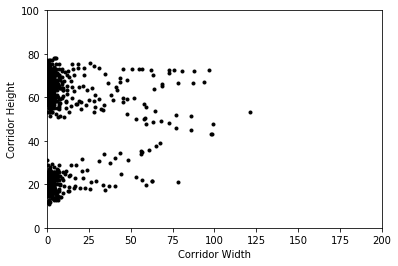
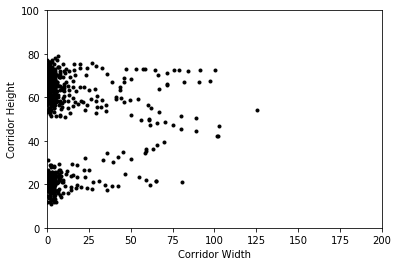
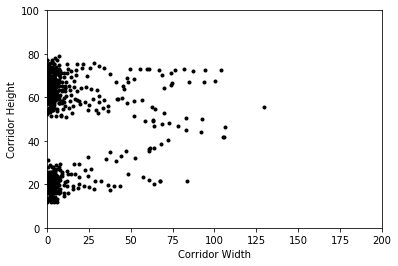
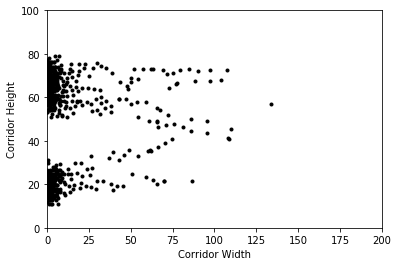
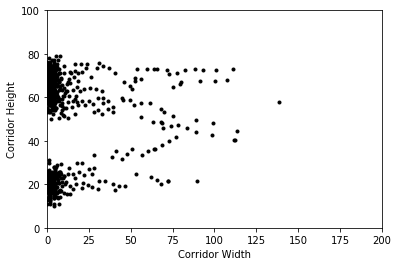
While I was doing this initial work, another colleague was working on creating a Python version of StationSim [A, West et al. (2019) DUST: sspmm Accessed ONLINE 27/03/2019: http://github.com/urban-analytics/dust]. StationSim is an agent based model for people walking through a corridor from left to right. There are three doors on the left that people enter from and two doors on the right that people exit through. In the model, due to the behaviour and number of agents, crowding occurs.
Below is a picture of StationSim from its Java implementation.

Here is some code to run the model, and figures illustrating how the crowd in the model develops. The code is available in full from the accompanying source file ‘StationSim.py’. (The StationSim model is still under development, so for the most up to date version have a look in its main development page).
import StationSim
# These are the parameters to configure the model
model_params = {
'width': 200,
'height': 100,
'pop_total':700,
'entrances': 3,
'entrance_space': 2,
'entrance_speed': .1,
'exits': 2,
'exit_space': 1,
'speed_min': .1,
'speed_desire_mean': 1,
'speed_desire_std': 1,
'separation': 2,
'batch_iterations': 4000,
'do_save': True,
'do_ani': True,
}
# Now run the model using these parameters:
StationSim.Model(model_params).batch()




Our goal is to use a particle filter on StationSim for data assimilation. Once StationSim was fully coded in Python, I added the particle filter to it using the step function in StationsSim. This took some time as we had to ensure the model and filter were communicating correctly and doing what we expected. This involved a lot of validation.
Below is the code for the particle filter for StationSim. It doesn’t work in the Jupyter Notebook as it needs to use multiprocessing (each particle runs as a separate process) but that wasn’t supported at the time of writing)
Particle filter for StationSim
import numpy as np
from scipy.spatial import cKDTree
import matplotlib.pyplot as plt
from copy import deepcopy
from multiprocessing import Pool
import multiprocessing
from StationSim import Model
#%% PARTICLE FILTER
# Multiprocessing Methods
def initial_state(particle,self):
"""
Set the state of the particles to the state of the
base model.
"""
self.states[particle,:] = self.base_model.agents2state()
return self.states[particle]
def assign_agents(particle,self):
"""
Assign the state of the particles to the
locations of the agents.
"""
self.models[particle].state2agents(self.states[particle])
return self.models[particle]
def step_particles(particle,self):
"""
Step each particle model, assign the locations of the
agents to the particle state with some noise, and
then use the new particle state to set the location
of the agents.
"""
self.models[particle].step()
self.states[particle] = (self.models[particle].agents2state()
+ np.random.normal(0, self.particle_std**2,
size=self.states[particle].shape))
self.models[particle].state2agents(self.states[particle])
return self.models[particle], self.states[particle]
class ParticleFilter:
'''
A particle filter to model the dynamics of the
state of the model as it develops in time.
'''
def __init__(self, Model, model_params, filter_params):
'''
Initialise Particle Filter
PARAMETERS
- number_of_particles: The number of particles used to simulate the model
- number_of_iterations: The number of iterations to run the model/particle filter
- resample_window: The number of iterations between resampling particles
- agents_to_visualise: The number of agents to plot particles for
- particle_std: The standard deviation of the noise added to particle states
- model_std: The standard deviation of the noise added to model observations
- do_save: Boolean to determine if data should be saved and stats printed
- do_ani: Boolean to determine if particle filter data should be animated
and displayed
DESCRIPTION
Firstly, set all attributes using filter parameters. Set time and
initialise base model using model parameters. Initialise particle
models using a deepcopy of base model. Determine particle filter
dimensions, initialise all remaining arrays, and set initial
particle states to the base model state using multiprocessing.
'''
for key, value in filter_params.items():
setattr(self, key, value)
self.time = 0
self.number_of_iterations = model_params['batch_iterations']
self.base_model = Model(model_params)
self.models = list([deepcopy(self.base_model) for _ in range(self.number_of_particles)])
self.dimensions = len(self.base_model.agents2state())
self.states = np.zeros((self.number_of_particles, self.dimensions))
self.weights = np.ones(self.number_of_particles)
self.indexes = np.zeros(self.number_of_particles, 'i')
if self.do_save:
self.active_agents = []
self.means = []
self.mean_errors = []
self.variances = []
self.unique_particles = []
self.states = np.array(pool.starmap(initial_state,list(zip(range(self.number_of_particles),[self]*self.number_of_particles))))
def step(self):
'''
Step Particle Filter
DESCRIPTION
Loop through process. Predict the base model and particles
forward. If the resample window has been reached,
reweight particles based on distance to base model and resample
particles choosing particles with higher weights. Then save
and animate the data. When done, plot save figures.
'''
while (self.time < self.number_of_iterations) & any([agent.active != 2 for agent in self.base_model.agents]):
self.time += 1
#if any([agent.active != 2 for agent in self.base_model.agents]):
# print(self.time/self.number_of_iterations)
# print(self.number_of_iterations)
self.predict()
if self.time % self.resample_window == 0:
self.reweight()
self.resample()
if self.do_save:
self.save()
if self.do_ani:
self.ani()
if self.plot_save:
self.p_save()
return max(self.mean_errors), np.average(self.mean_errors), max(self.variances), np.average(self.variances)
def predict(self):
'''
Predict
DESCRIPTION
Increment time. Step the base model. Set self as a constant
in step_particles and then use a multiprocessing method to step
particle models, set the particle states as the agent
locations with some added noise, and reassign the
locations of the particle agents using the new particle
states. We extract the models and states from the stepped
particles variable.
'''
self.base_model.step()
stepped_particles = pool.starmap(step_particles,list(zip(range(self.number_of_particles),[self]*self.number_of_particles)))
self.models = [stepped_particles[i][0] for i in range(len(stepped_particles))]
self.states = np.array([stepped_particles[i][1] for i in range(len(stepped_particles))])
return
def reweight(self):
'''
Reweight
DESCRIPTION
Add noise to the base model state to get a measured state. Calculate
the distance between the particle states and the measured base model
state and then calculate the new particle weights as 1/distance.
Add a small term to avoid dividing by 0. Normalise the weights.
'''
measured_state = (self.base_model.agents2state()
+ np.random.normal(0, self.model_std**2, size=self.states.shape))
distance = np.linalg.norm(self.states - measured_state, axis=1)
self.weights = 1 / (distance + 1e-99)**2
self.weights /= np.sum(self.weights)
return
def resample(self):
'''
Resample
DESCRIPTION
Calculate a random partition of (0,1) and then
take the cumulative sum of the particle weights.
Carry out a systematic resample of particles.
Set the new particle states and weights and then
update agent locations in particle models using
multiprocessing methods.
'''
offset_partition = ((np.arange(self.number_of_particles)
+ np.random.uniform()) / self.number_of_particles)
cumsum = np.cumsum(self.weights)
i, j = 0, 0
while i < self.number_of_particles:
if offset_partition[i] < cumsum[j]:
self.indexes[i] = j
i += 1
else:
j += 1
self.states[:] = self.states[self.indexes]
self.weights[:] = self.weights[self.indexes]
self.unique_particles.append(len(np.unique(self.states,axis=0)))
self.models = pool.starmap(assign_agents,list(zip(range(self.number_of_particles),[self]*self.number_of_particles)))
return
def save(self):
'''
Save
DESCRIPTION
Calculate number of active agents, mean, and variance
of particles and calculate mean error between the mean
and the true base model state. Plot active agents,mean
error and mean variance.
'''
self.active_agents.append(sum([agent.active == 1 for agent in self.base_model.agents]))
active_states = [agent.active == 1 for agent in self.base_model.agents for _ in range(2)]
if any(active_states):
mean = np.average(self.states[:,active_states], weights=self.weights, axis=0)
variance = np.average((self.states[:,active_states] - mean)**2, weights=self.weights, axis=0)
self.means.append(mean)
self.variances.append(np.average(variance))
truth_state = self.base_model.agents2state()
self.mean_errors.append(np.linalg.norm(mean - truth_state[active_states], axis=0))
return
def p_save(self):
'''
Plot Save
DESCRIPTION
Plot active agents, mean error and mean variance.
'''
plt.figure(2)
plt.plot(self.active_agents)
plt.ylabel('Active agents')
plt.show()
plt.figure(3)
plt.plot(self.mean_errors)
plt.ylabel('Mean Error')
plt.show()
plt.figure(4)
plt.plot(self.variances)
plt.ylabel('Mean Variance')
plt.show()
plt.figure(5)
plt.plot(self.unique_particles)
plt.ylabel('Unique Particles')
plt.show()
print('Max mean error = ',max(self.mean_errors))
print('Average mean error = ',np.average(self.mean_errors))
print('Max mean variance = ',max(self.variances[2:]))
print('Average mean variance = ',np.average(self.variances[2:]))
def ani(self):
'''
Animate
DESCRIPTION
Plot the base model state and some of the
particles. Only do this if there is at least 1 active
agent in the base model. We adjust the markersizes of
each particle to represent the weight of that particle.
We then plot some of the agent locations in the particles
and draw lines between the particle agent location and
the agent location in the base model.
'''
if any([agent.active == 1 for agent in self.base_model.agents]):
plt.figure(1)
plt.clf()
markersizes = self.weights
if np.std(markersizes) != 0:
markersizes *= 4 / np.std(markersizes) # revar
markersizes += 8 - np.mean(markersizes) # remean
particle = -1
for model in self.models:
particle += 1
markersize = np.clip(markersizes[particle], .5, 8)
for agent in model.agents[:self.agents_to_visualise]:
if agent.active == 1:
unique_id = agent.unique_id
if self.base_model.agents[unique_id].active == 1:
locs = np.array([self.base_model.agents[unique_id].location, agent.location]).T
plt.plot(*locs, '-k', alpha=.1, linewidth=.3)
plt.plot(*agent.location, 'or', alpha=.3, markersize=markersize)
for agent in self.base_model.agents:
if agent.active == 1:
plt.plot(*agent.location, 'sk',markersize = 4)
plt.axis(np.ravel(self.base_model.boundaries, 'F'))
plt.pause(1 / 4)
def single_run_particle_numbers():
particle_num = 20
runs = 1
for i in range(runs):
# Run the particle filter
filter_params = {
'number_of_particles': particle_num,
'resample_window': 100,
'agents_to_visualise': 2,
'particle_std': 1,
'model_std': 1,
'do_save': True,
'plot_save':False,
'do_ani': False,
}
pf = ParticleFilter(Model, model_params, filter_params)
print(i, particle_num, pf.step())
if __name__ == '__main__':
__spec__ = None
# Pool object needed for multiprocessing
pool = Pool(processes=multiprocessing.cpu_count())
model_params = {
'width': 200,
'height': 100,
'pop_total':700,
'entrances': 3,
'entrance_space': 2,
'entrance_speed': .1,
'exits': 2,
'exit_space': 1,
'speed_min': .1,
'speed_desire_mean': 1,
'speed_desire_std': 1,
'separation': 2,
'batch_iterations': 4000,
'do_save': True,
'do_ani': True,
}
if not True:
Model(model_params).batch()
else:
single_run_particle_numbers()
Test particle filter
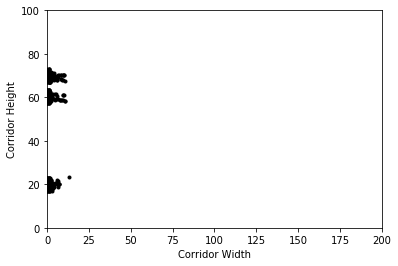
Once we were happy with the way they were running, we began discussing how we could examine the randomness in the model and in the filter. In the model, the agents move randomly up or down as they try and move around the other agents in their way. In the filter, randomness is added to the state of the particles to prevent particle collapse. Particle collapse occurs when only one particle is resampled during the resample step and so all particles have the same state. This provides a very poor estimate for the state of the base model so it should be avoided. Adding randomness to the particles ensures there is some diversity so it very unlikely only one particle is resampled.
Below is a picture of particle collapse or particle impoverishment.

Randomness is also added to the observed state of the underlying model to reflect the uncertainty in real life sensors. In addition, we have parameters such as the number of particles and resample window that also affect how the particle filter behaves. While examining how these different parameters affect the filter, we realised it was taking quite a long time. We then thought to consider multiprocessing. This would allow the code to run faster as different particles can be run simultaneously rather than one at a time.
Below are pictures of tasks being completed on a single thread and tasks being completed using multiprocessing. We can see multiprocessing is much faster.


In addition, we were also looking into the literature to see what outputs are used to determine if a particle filter is behaving well. We found that the mean location of the particles, the variance of the particles, and the error between the mean location of the particles and the location of the underlying model are going metrics for the filter. One problem we then encountered was that the mean and variance was being calculated for particle agents that were no longer active in the StationSim simulation. Agents will have exited the corridor and be placed at some fixed location outside the boundary and they were still contributing to the mean and variance, which meant they were skewed. Another problem we found is that we could not do the multiprocessing we wanted to do in a Jupyter Notebook so we moved to writing python scripts directly, using the Spyder IDE.
We then moved the testing to the University of Leeds Advanced Resarch Computing (ARC3) high performance computing (HPC) environment. We started with a toy model of only 10 agents in the model to figure out how to actually use the supercomputer. We began by varying the number of particles, then the standard deviation for the particle noise, and finally the standard deviation for the observation noise. Once this was done, we scaled up the number of agents to 700 for the full model and started doing the same testing.
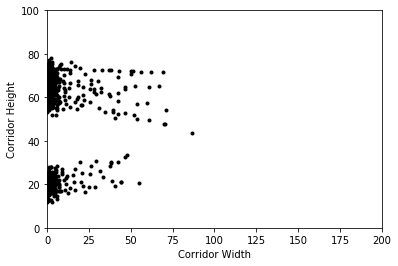
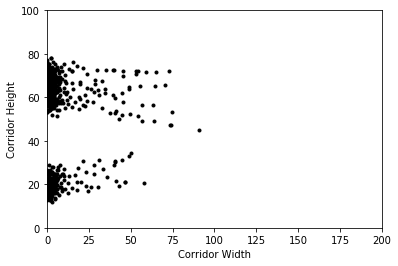
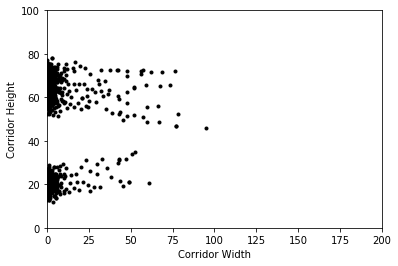
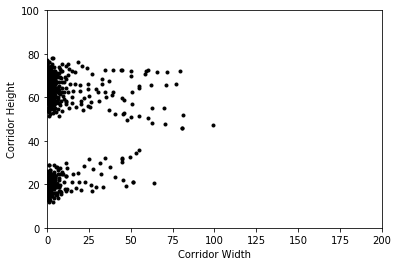
After noticing there were still some bottlenecks and locks in the multiprocessing, we updated the filter to remove these and also step the particles continuously until the next observation. In terms of the results, this changed very little but in terms of speed, this made the code run a lot faster. I did some maths to work out how far an agent could move before hitting the next agent in front of it but the solver function is really slow so we decided not to use that. We then began running experiments to plot number of agents vs number of particles as a contour plot with the height given by the error in the particle filter. We expect the find areas where the particle filter works really well (few agents, many particles) and areas where it doesn’t work well (many agents, few particles).
Paper abstract for GISRUK 2019
http://www.newcastle.gisruk.org/
In recent years, cities have used the increase in data to make decisions that result in the city becoming more efficient and sustainable through automation. These cities are known as smart cities. One of the many important questions smart cities would like to answer is how do people behave? Being able to model the behaviour of a population in a city will prove very fruitful, as it will inform a variety of policy decisions. It is often very difficult to gain insight into human behaviour from a macroscopic point of view in real time.
One way to solve this issue is to use agent based models. These models attempt to simulate the behaviours of a population from a microscopic point of view by using simulated individuals, the ‘agents’. The behaviour of the agents can be programmed to reflect the various dynamics of a particular city. One key component of agent based models is that there is some collective behaviour forming that is not programmed into individuals, known as ‘emergence’. Agent based models are generally given some initial conditions and then they evolve forward in time independently from the real world environment they are simulating. This often results in the models diverging away from reality due to the limited accuracy of the initial conditions and model behaviour. To solve this problem, these models can use real time data from reality to update the state of the model in real time. This is known as data assimilation. New data is used to ensure the model continues to accurately reflect reality.
There are many ways to carry out data assimilation. One such method is known as a particle filter. Particle filters run numerous instances of the agent based model, known as ‘particles’, and allow them to develop forward in time. As new information is received about the true state of reality, the particle filter weights the particles based on how similar they are to the model state determined by the new information. Particles with a large weight are model runs that are very similar to the information received while particles with small weights are model runs that do not agree well with the new data. The particles are then resampled based on their weight, so that particles with a large weight are more likely to be chosen to be duplicated and particles with small weights are more likely to be discarded. In this way, the resampling results in particles with larger weights surviving and particles with small weights dying off. At this stage, the particles run forward in time until the next piece of information is received and the process continues.
This particle filter method allows the models to run while also being able to update itself with new data in real time, allowing the model to bet- ter simulate reality over long periods of time. One of the advantages of using particle filters over other types of data assimilation is that it can handle nonlinear dynamics, which applies to a wide range of applications. One of the dis- advantages is that it can be quite computation- ally expensive as complicated models require a significant number of particles in order to accu- rately assimilate the new data. Problems with particle filters include all particles collapsing to one state due to a lack of diversity, known as the degeneracy problem, and all particles fail- ing to be similar to the new information due to not enough particles being simulated.
The agent based model we are working on represents an environment like a corridor. In the model, agents enter the corridor from one side and walk through the corridor to exits on the other side. Just like people in real life, the agents have different speeds and different destinations. The emergence we find in this agent based model is crowding. As agents cross paths attempting to go to their exit and as slow agents block the path of fast agents, crowds form. We chose this model because it is simple enough for us to carry out data assimilation on it in a meaningful way and because it is complicated enough to have the emergent behaviour of crowding. In this case, as we do not have data from any corridor in particular, we use the model itself as our reality from which we receive new data. More details can be found on our Github page.
Training / Workshops / Presentations
Netlogo practicals, Intro to GIS workshop, Mason tutorial, GIS for crime data training, ONS Safe Researcher training, QGIS workshop, ITS Big Data presentation, Python workshop, Workshop in Manchester, Tableau workshop, Climate meeting. Intern presentation, Data Carpentry workshop, Presentation training, Meeting Improbable in London.